【手把手教学】RoboSense E1R 固态激光雷达 Windows 可视化连接全攻略
RoboSense E1R Windows 连接教程:接口盒接线、电脑 IP 设为 192.168.1.102、关闭防火墙、用 RSView 打开 RS-E1 点云,并附 Ping 通但无画面等排错要点。
前言
RoboSense E1R 是一款高性能的固态激光雷达,采用 Flash 扫描方式,拥有 120° x 90° 的超大视场角。对于初学者来说,拿到雷达后的第一步就是将其连接到电脑并看到点云画面。本文将带你走过从硬件接线到软件显示的每一个微小细节,解决“Ping 得通却没画面”、“绿灯闪烁”等常见坑点。
一、 硬件准备
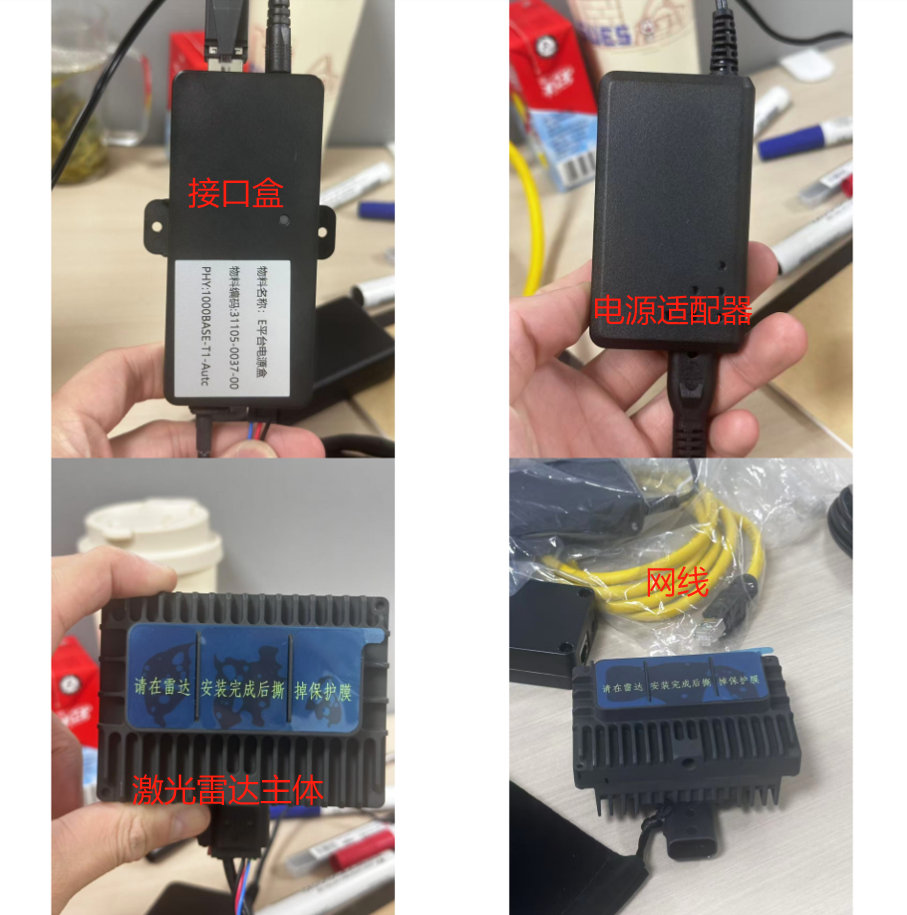
在开始之前,请确保你拥有以下配件:
- RoboSense E1R 雷达主体
- 接口盒(Interface Box):由于雷达使用的是车载以太网接口,必须通过接口盒转接为普通网口。
- 电源适配器:电压要求 9V - 16V(建议使用 12V 2A 的直流电源,接口为标准 DC 5.5-2.1)。
- 网线:超五类或六类网线一条。
- Windows 电脑(建议 Win10 或 Win11)。
- 其他必要接线(商家会一起提供)
二、 第一步:物理连接
物理连接的顺序建议如下,以保护精密电子元件:
- 雷达连接:将雷达自带的大型 TE 弯插头接入接口盒的对应接口,确保插紧。
- 网络连接:用网线连接接口盒的 RJ45 网口和电脑的网口。
- 电源接入:最后接入电源适配器。
- 现象观察:接口盒上的绿色指示灯会亮起。
- 注意:如果绿灯在闪烁,通常代表雷达正在进行高频数据传输,属于正常现象。
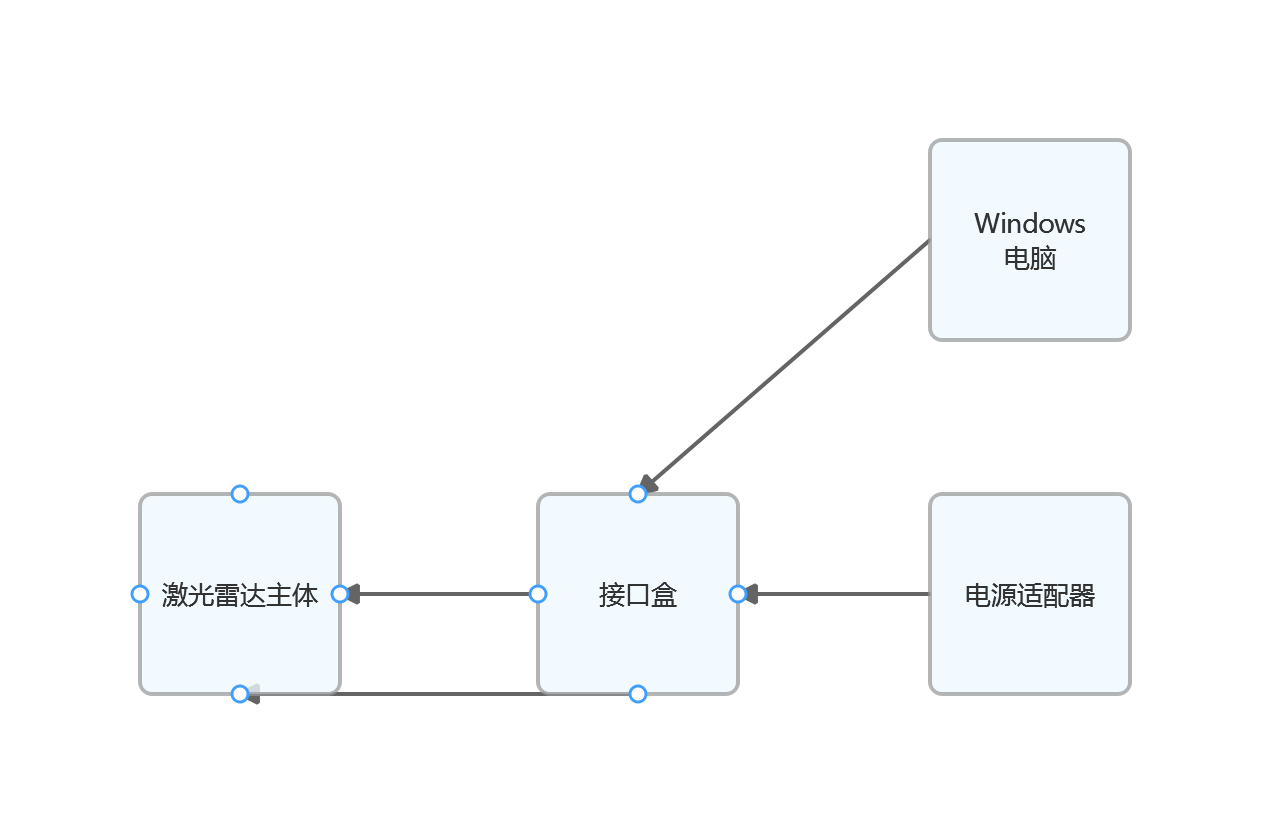
接线如上图所示,一根连线变代表实物的一根连线
三、 第二步:电脑网络配置(核心环节)
雷达和电脑通讯的前提是:它们必须在同一个网段,且 IP 地址必须匹配雷达的发送目标。
- 雷达默认信息:
- 雷达静态 IP:
192.168.1.200 - 雷达发送目标 IP:
192.168.1.102(雷达默认只会把数据发给.102这个地址)。
- 雷达静态 IP:
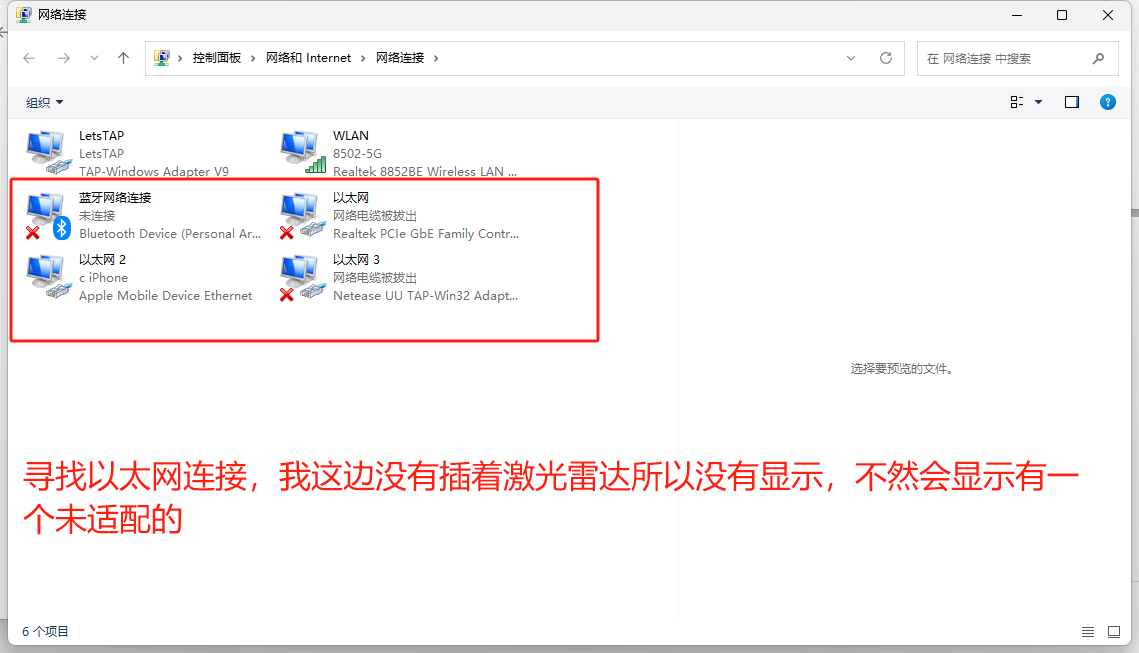
- 设置电脑 IP:
-
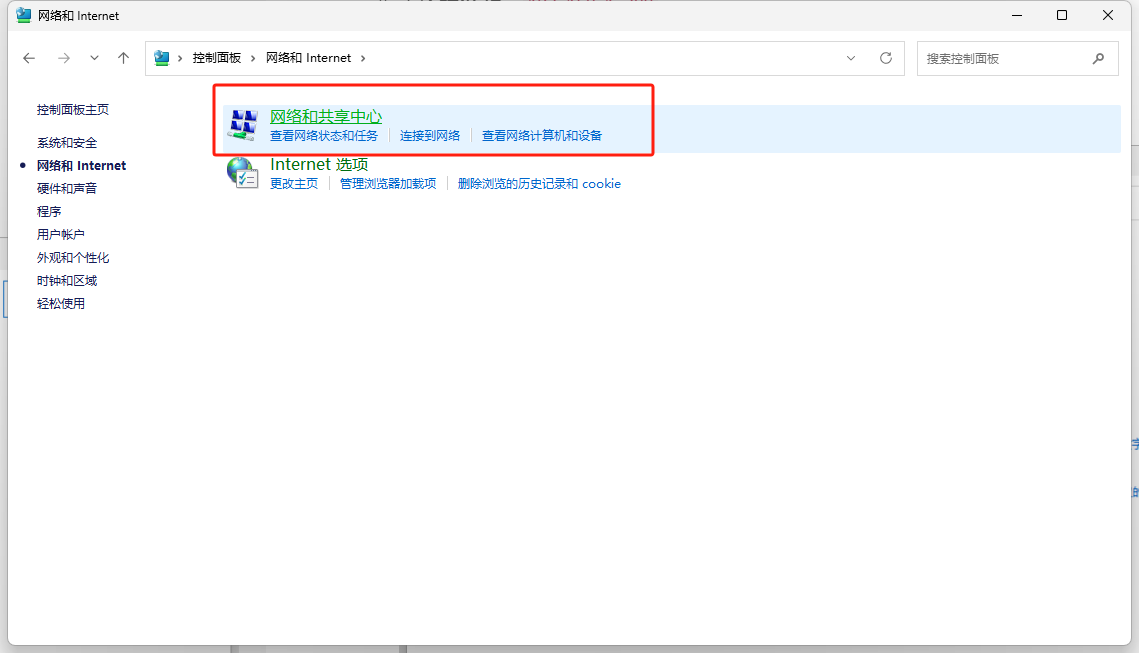
打开:
控制面板->网络和共享中心->更改适配器设置。


-
右键点击你的以太网卡,选择
属性。
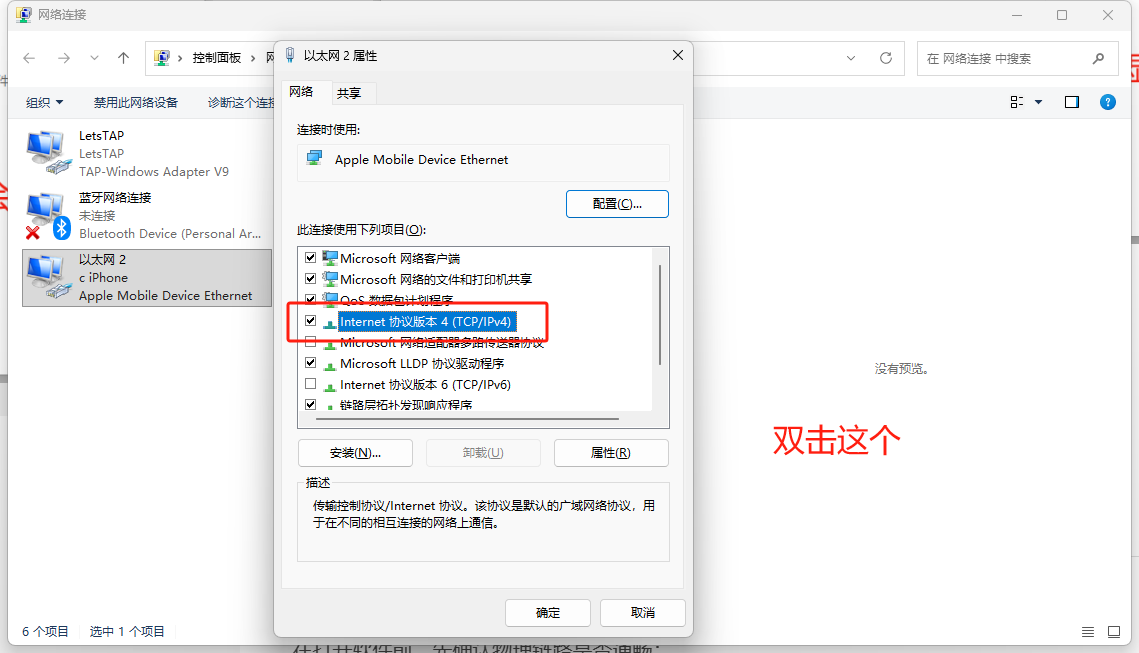
-
双击
Internet 协议版本 4 (TCP/IPv4)。 -
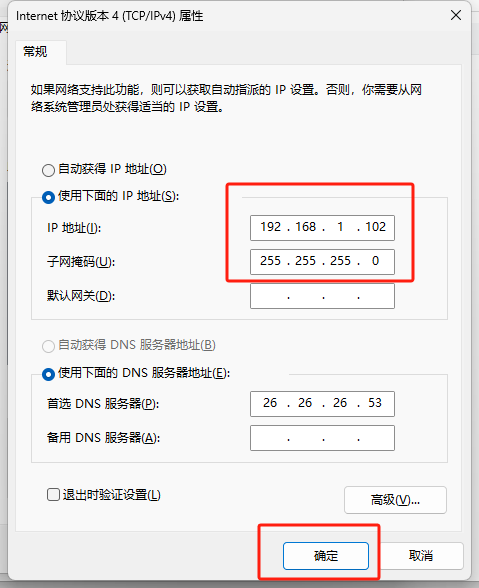
选择“使用下面的 IP 地址”:
- IP 地址:手动输入
192.168.1.102(必须是这个地址)。 - 子网掩码:输入
255.255.255.0。
- IP 地址:手动输入
-
点击确定保存。
-
-
四、 第三步:连通性验证(Ping 测试)
在打开软件前,先确认物理链路是否通畅:
- 按下键盘
Win + R,输入cmd回车。 - 输入命令:
ping 192.168.1.200。 - 结果判断:
- 如果显示“来自 192.168.1.200 的回复”,说明连接成功。
- 如果显示“请求超时”,请检查网线和电脑 IP 是否设置正确。
显示如下就是成功
C:\Users\Z>ping 192.168.1.200
正在 Ping 192.168.1.200 具有 32 字节的数据:
来自 192.168.1.200 的回复: 字节=32 时间=1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间=3ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
192.168.1.200 的 Ping 统计信息:
数据包: 已发送 = 4,已接收 = 4,丢失 = 0 (0% 丢失),
往返行程的估计时间(以毫秒为单位):
最短 = 0ms,最长 = 3ms,平均 = 1ms
五、 第四步:环境清理(关闭防火墙)
这是 90% 的用户收不到点云的原因:Windows 防火墙拦截了 UDP 数据包。
- 进入
控制面板->系统和安全->Windows Defender 防火墙。 - 点击左侧
启用或关闭 Windows Defender 防火墙。 - 将专用网络和公用网络下的防火墙全部选择“关闭”。
- 点击确定(测试完成后可重新开启,但在调试雷达时必须关闭)。
六、 第五步:使用 RSView 实现可视化
-
下载软件:前往 RoboSense 官网资源中心 下载最新版本的 RSView。
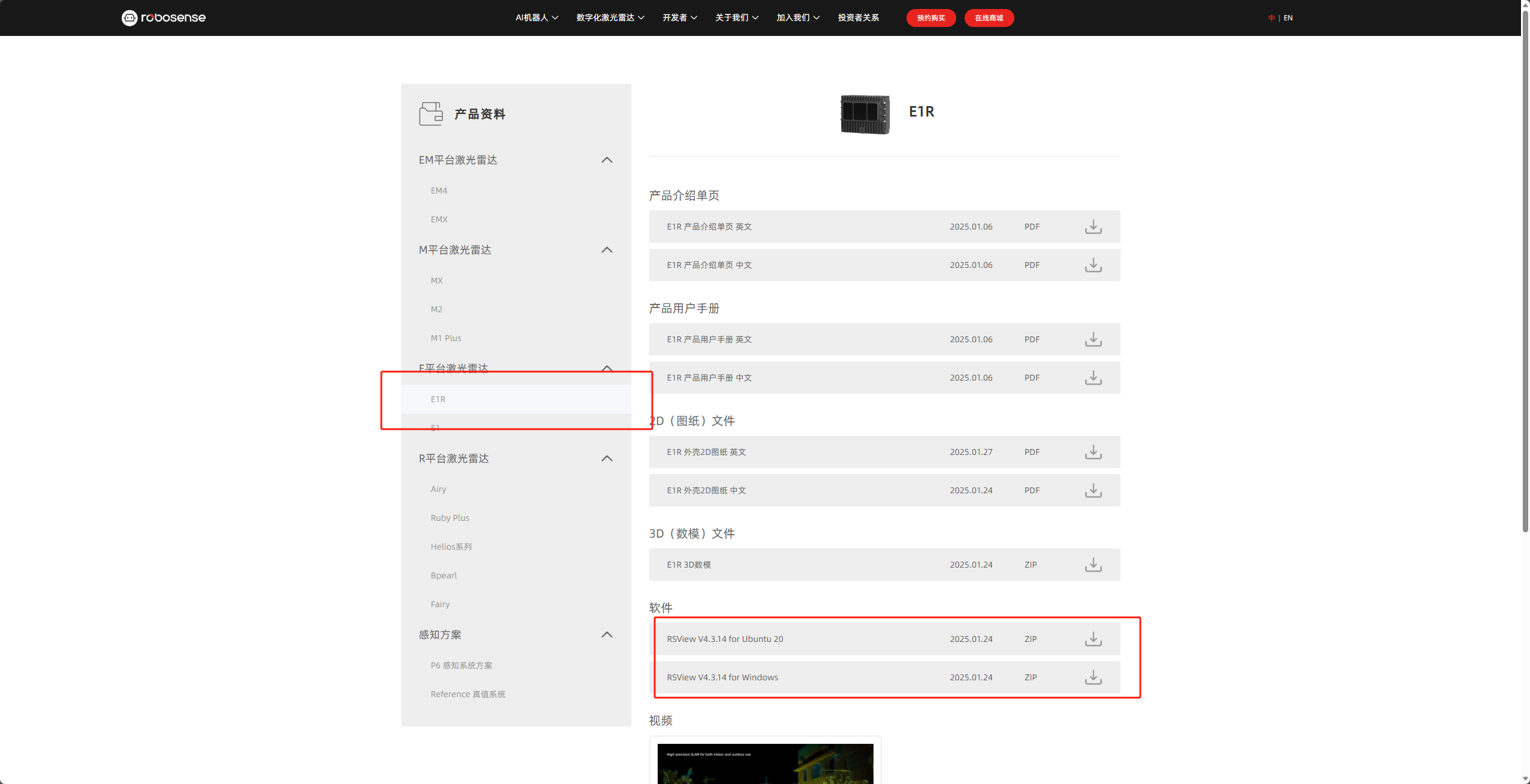
-
解压注意:解压路径中严禁出现任何中文字符,否则软件无法打开或出错。
-
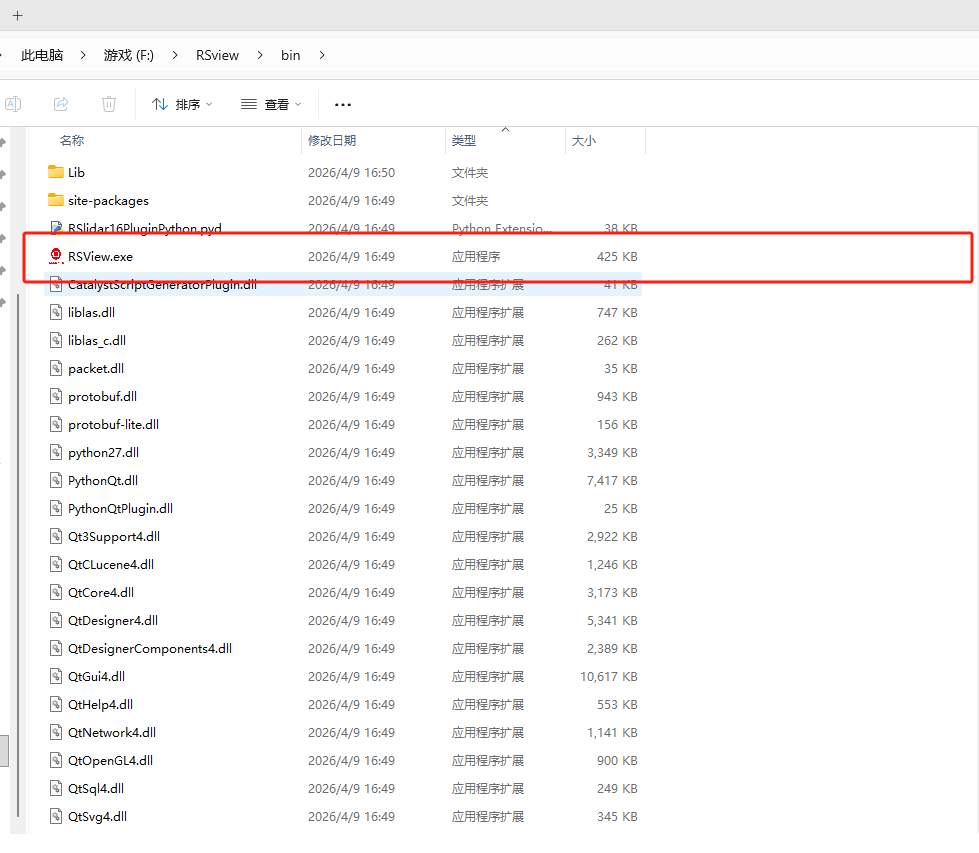
运行程序:双击
RSView.exe。
-
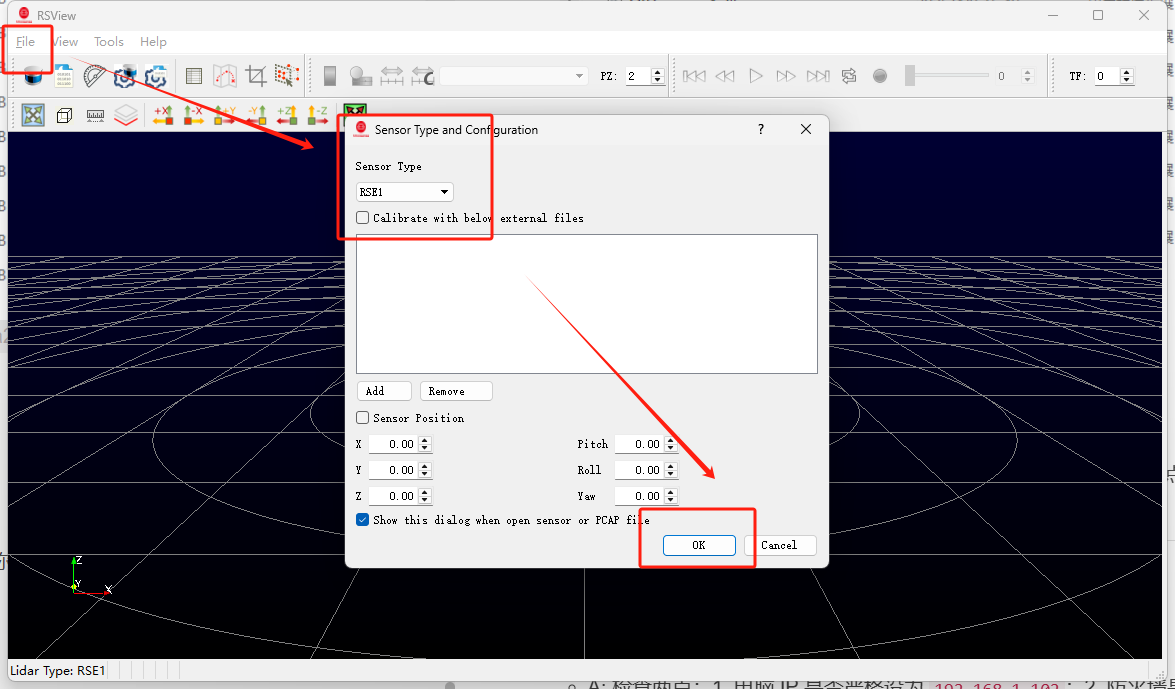
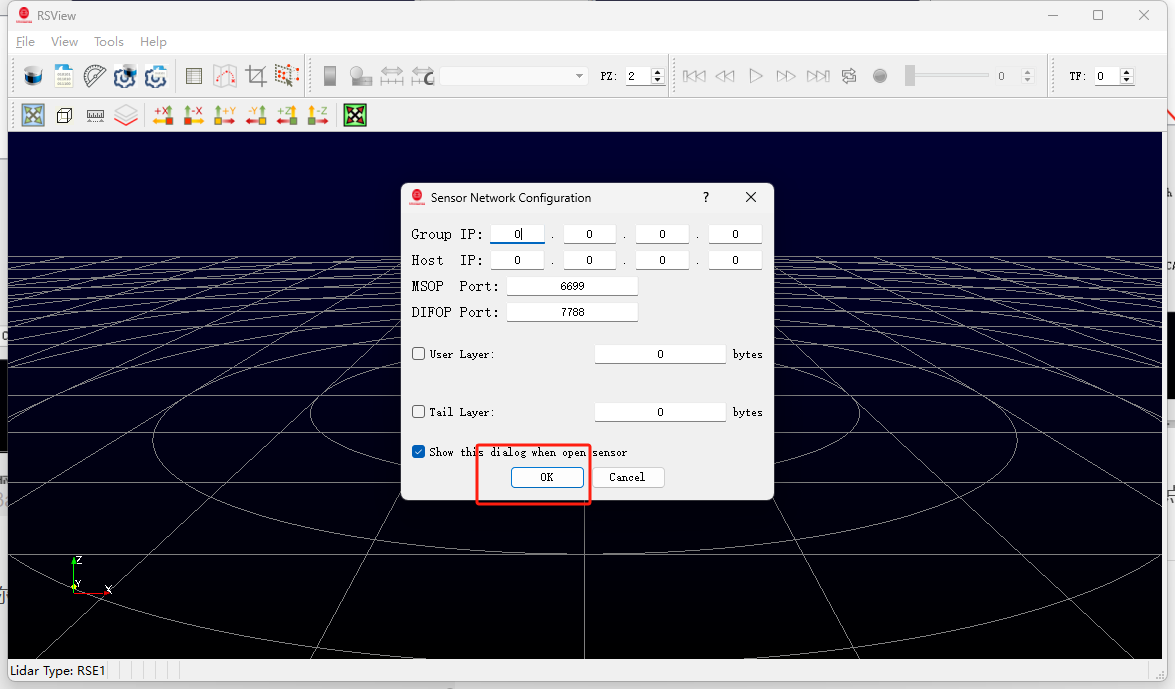
配置流:
- 点击菜单栏
File->Open->Sensor Stream。 - Lidar Model(雷达型号):选择 RS-E1。
- 点击菜单栏
-
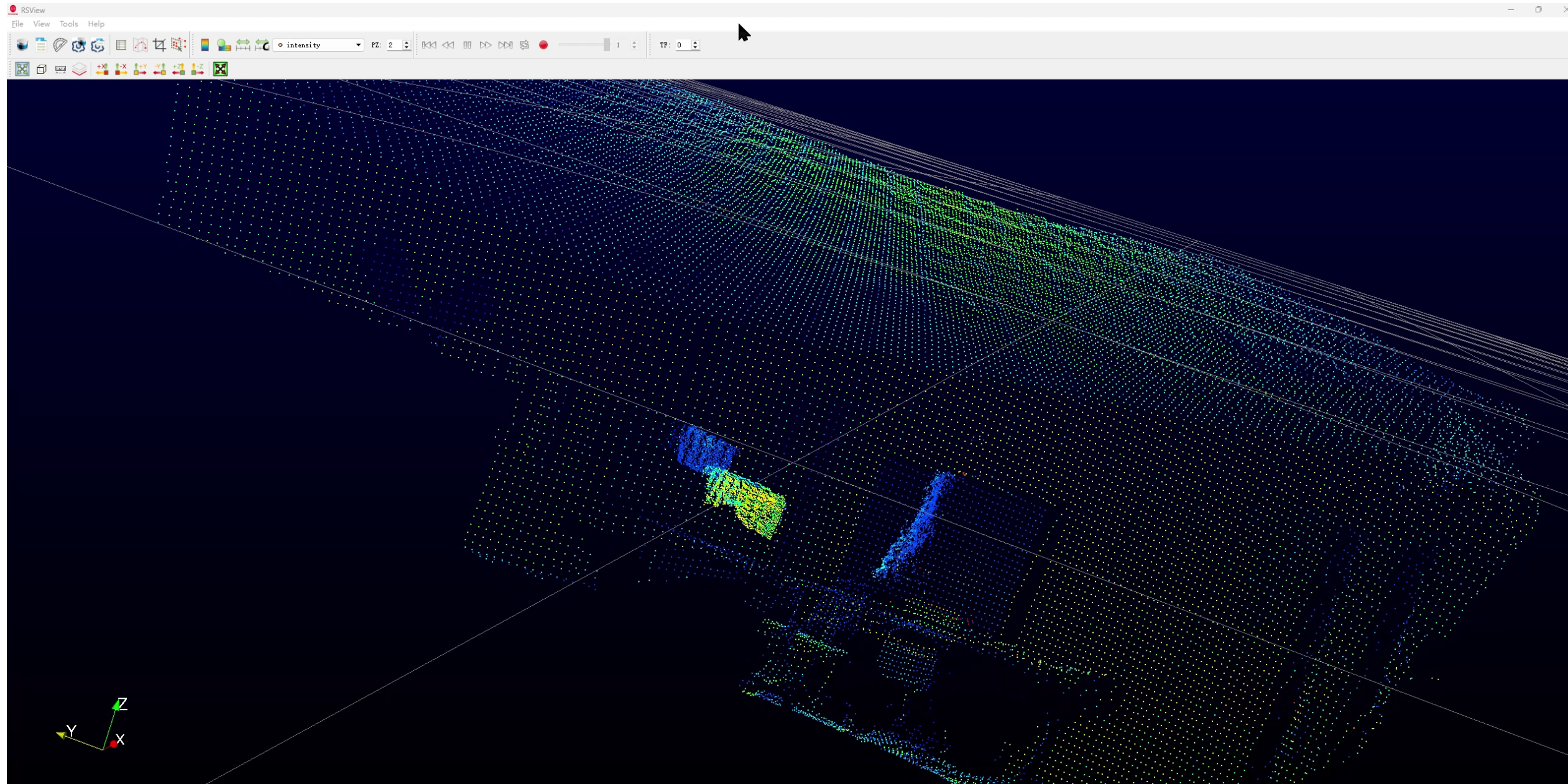
查看点云:点击确定后,你应该能在黑色的 3D 网格空间里看到彩色的点云画面。你可以通过鼠标左键旋转视角,滚轮缩放。
七、 常见问题排查(Troubleshooting)
- Q: Ping 得通,但 RSView 里是黑屏?
- A: 检查两点:1. 电脑 IP 是否严格设为
192.168.1.102;2. 防火墙是否彻底关闭。
- A: 检查两点:1. 电脑 IP 是否严格设为
- Q: 接口盒绿灯一直闪烁正常吗?
- A: 正常。闪烁通常代表雷达正在以 10Hz 的频率不停向外发送 UDP 点云数据包。
- Q: 雷达外壳很烫手?
- A: E1R 是大功率固态雷达,工作时发热属于正常现象。建议不要在密闭、不通风的环境下长时间运行,且避免手部直接长时间触摸。
八、 结束实验与维护
- 断电顺序:先拔掉接口盒的 DC 电源,再关闭软件。不建议在带电状态下频繁拔插雷达端的 TE 连接器。
- 清洁:若窗口有指纹,使用无尘布蘸取少量酒精轻轻擦拭,切勿用纸巾干擦以免划伤光学镀层。
希望这篇教程能帮你顺利开启 RoboSense E1R 的探索之旅!如果有其他问题,欢迎在评论区留言讨论。
【手把手教學】RoboSense E1R 固態鐳射雷達 Windows 視覺化連線全攻略
RoboSense E1R Windows 連線教學:介面盒接線、電腦 IP 設為 192.168.1.102、關閉防火牆、用 RSView 開啟 RS-E1 點雲,並附 Ping 通但無畫面等排錯要點。
來源:https://blog.csdn.net/2403_87969572/article/details/159997679
抓取時間(ISO本地):2026-05-18 05:17:40
前言
RoboSense E1R 是一款高效能的固態鐳射雷達,採用 Flash 掃描方式,擁有 120° x 90° 的超大視場角。對於初學者來說,拿到雷達後的第一步就是將其連線到電腦並看到點雲畫面。本文將帶你走過從硬體接線到軟體顯示的每一個微小細節,解決“Ping 得通卻沒畫面”、“綠燈閃爍”等常見坑點。
一、 硬體準備
在開始之前,請確保你擁有以下配件:
- RoboSense E1R 雷達主體
- 介面盒(Interface Box):由於雷達使用的是車載乙太網介面,必須透過介面盒轉接為普通網口。
- 電源介面卡:電壓要求 9V - 16V(建議使用 12V 2A 的直流電源,介面為標準 DC 5.5-2.1)。
- 網線:超五類或六類網線一條。
- Windows 電腦(建議 Win10 或 Win11)。
- 其他必要接線(商家會一起提供)
二、 第一步:物理連線
物理連線的順序建議如下,以保護精密電子元件:
- 雷達連線:將雷達自帶的大型 TE 彎插頭接入介面盒的對應介面,確保插緊。
- 網路連線:用網線連線介面盒的 RJ45 網口和電腦的網口。
- 電源接入:最後接入電源介面卡。
- 現象觀察:介面盒上的綠色指示燈會亮起。
- 注意:如果綠燈在閃爍,通常代表雷達正在進行高頻資料傳輸,屬於正常現象。
接線如上圖所示,一根連線變代表實物的一根連線
三、 第二步:電腦網路配置(核心環節)
雷達和電腦通訊的前提是:它們必須在同一個網段,且 IP 地址必須匹配雷達的傳送目標。
- 雷達預設資訊:
- 雷達靜態 IP:
192.168.1.200 - 雷達傳送目標 IP:
192.168.1.102(雷達預設只會把資料發給.102這個地址)。
- 雷達靜態 IP:
- 設定電腦 IP:
-
開啟:
控制面板->網路和共享中心->更改介面卡設定。
-
右鍵點選你的乙太網卡,選擇
屬性。
-
雙擊
Internet 協議版本 4 (TCP/IPv4)。 -
選擇“使用下面的 IP 地址”:
- IP 地址:手動輸入
192.168.1.102(必須是這個地址)。 - 子網掩碼:輸入
255.255.255.0。
- IP 地址:手動輸入
-
點選確定儲存。
-
-
四、 第三步:連通性驗證(Ping 測試)
在開啟軟體前,先確認物理鏈路是否通暢:
- 按下鍵盤
Win + R,輸入cmd回車。 - 輸入命令:
ping 192.168.1.200。 - 結果判斷:
- 如果顯示“來自 192.168.1.200 的回覆”,說明連線成功。
- 如果顯示“請求超時”,請檢查網線和電腦 IP 是否設定正確。
顯示如下就是成功
C:\Users\Z>ping 192.168.1.200
正在 Ping 192.168.1.200 具有 32 位元組的資料:
來自 192.168.1.200 的回覆: 位元組=32 時間=1ms TTL=255
來自 192.168.1.200 的回覆: 位元組=32 時間<1ms TTL=255
來自 192.168.1.200 的回覆: 位元組=32 時間=3ms TTL=255
來自 192.168.1.200 的回覆: 位元組=32 時間<1ms TTL=255
192.168.1.200 的 Ping 統計資訊:
資料包: 已傳送 = 4,已接收 = 4,丟失 = 0 (0% 丟失),
往返行程的估計時間(以毫秒為單位):
最短 = 0ms,最長 = 3ms,平均 = 1ms
五、 第四步:環境清理(關閉防火牆)
這是 90% 的使用者收不到點雲的原因:Windows 防火牆攔截了 UDP 資料包。
- 進入
控制面板->系統和安全->Windows Defender 防火牆。 - 點選左側
啟用或關閉 Windows Defender 防火牆。 - 將專用網路和公用網路下的防火牆全部選擇“關閉”。
- 點選確定(測試完成後可重新開啟,但在除錯雷達時必須關閉)。
六、 第五步:使用 RSView 實現視覺化
-
下載軟體:前往 RoboSense 官網資源中心 下載最新版本的 RSView。
-
解壓注意:解壓路徑中嚴禁出現任何中文字元,否則軟體無法開啟或出錯。
-
執行程式:雙擊
RSView.exe。
-
配置流:
- 點選選單欄
File->Open->Sensor Stream。 - Lidar Model(雷達型號):選擇 RS-E1。
- 點選選單欄
-
檢視點雲:點選確定後,你應該能在黑色的 3D 網格空間裡看到彩色的點雲畫面。你可以透過滑鼠左鍵旋轉視角,滾輪縮放。
七、 常見問題排查(Troubleshooting)
- Q: Ping 得通,但 RSView 裡是黑屏?
- A: 檢查兩點:1. 電腦 IP 是否嚴格設為
192.168.1.102;2. 防火牆是否徹底關閉。
- A: 檢查兩點:1. 電腦 IP 是否嚴格設為
- Q: 介面盒綠燈一直閃爍正常嗎?
- A: 正常。閃爍通常代表雷達正在以 10Hz 的頻率不停向外傳送 UDP 點雲資料包。
- Q: 雷達外殼很燙手?
- A: E1R 是大功率固態雷達,工作時發熱屬於正常現象。建議不要在密閉、不通風的環境下長時間執行,且避免手部直接長時間觸控。
八、 結束實驗與維護
- 斷電順序:先拔掉介面盒的 DC 電源,再關閉軟體。不建議在帶電狀態下頻繁拔插雷達端的 TE 聯結器。
- 清潔:若視窗有指紋,使用無塵布蘸取少量酒精輕輕擦拭,切勿用紙巾乾擦以免劃傷光學鍍層。
希望這篇教程能幫你順利開啟 RoboSense E1R 的探索之旅!如果有其他問題,歡迎在評論區留言討論。
Step-by-Step: RoboSense E1R Solid-State LiDAR Windows Visualization Connection Guide
RoboSense E1R on Windows: wiring, set PC to 192.168.1.102, disable firewall, open RS-E1 stream in RSView, plus fixes when ping works but no point cloud.
Captured at (local ISO): 2026-05-18 05:17:40
Introduction
The RoboSense E1R is a high-performance solid-state LiDAR using Flash scanning with a large 120° × 90° field of view. For beginners, the first step after unboxing is connecting it to a PC and seeing the point cloud. This tutorial walks through every detail from hardware wiring to on-screen display, and addresses common pitfalls like “ping works but no image” and “green LED blinking.”
I. Hardware Preparation
Before you start, make sure you have:
- RoboSense E1R LiDAR unit
- Interface box: The lidar uses an automotive Ethernet connector; you must use the interface box to adapt to a standard RJ45 port.
- Power adapter: 9 V–16 V (recommended 12 V 2 A DC, standard DC 5.5–2.1 plug).
- Ethernet cable: Cat5e or Cat6.
- Windows PC (Windows 10 or 11 recommended).
- Other cables (usually included by the vendor).
II. Step 1: Physical Connection
Recommended connection order to protect sensitive electronics:
- Lidar connection: Plug the lidar’s large TE angled connector into the matching port on the interface box; seat it firmly.
- Network: Connect the interface box RJ45 to your PC with an Ethernet cable.
- Power last: Plug in the power adapter.
- What to expect: The interface box green LED turns on.
- Note: If the green LED blinks, that usually means the lidar is sending data at high rate—this is normal.
In the diagram above, each line represents one physical cable.
III. Step 2: PC Network Configuration (Critical)
Lidar and PC must be on the same subnet, and your PC IP must match where the lidar sends data.
- Lidar defaults:
- Lidar static IP:
192.168.1.200 - Lidar destination IP:
192.168.1.102(by default the lidar only sends data to.102).
- Lidar static IP:
- Set PC IP:
-
Open:
Control Panel→Network and Sharing Center→Change adapter settings.
-
Right-click your Ethernet adapter →
Properties.
-
Double-click
Internet Protocol Version 4 (TCP/IPv4). -
Choose “Use the following IP address”:
- IP address:
192.168.1.102(must be exactly this). - Subnet mask:
255.255.255.0.
- IP address:
-
OK to save.
-
-
IV. Step 3: Connectivity Check (Ping Test)
Before opening software, verify the link:
- Press
Win + R, typecmd, Enter. - Run:
ping 192.168.1.200. - Interpret results:
- Replies from
192.168.1.200→ connection OK. - Request timed out → check cable and PC IP.
- Replies from
Success looks like this:
C:\Users\Z>ping 192.168.1.200
正在 Ping 192.168.1.200 具有 32 字节的数据:
来自 192.168.1.200 的回复: 字节=32 时间=1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间=3ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
192.168.1.200 的 Ping 统计信息:
数据包: 已发送 = 4,已接收 = 4,丢失 = 0 (0% 丢失),
往返行程的估计时间(以毫秒为单位):
最短 = 0ms,最长 = 3ms,平均 = 1ms
V. Step 4: Environment Prep (Disable Firewall)
This is why 90% of users see no point cloud: Windows Firewall blocks UDP packets.
Control Panel→System and Security→Windows Defender Firewall.- Click
Turn Windows Defender Firewall on or offon the left. - Turn firewall Off for both Private and Public networks.
- OK (you can turn it back on after testing; keep it off while debugging the lidar).
VI. Step 5: Visualize with RSView
-
Download: Get the latest RSView from the RoboSense resource center.
-
Extract path: No Chinese characters anywhere in the extract path, or the app may fail to start.
-
Run: Double-click
RSView.exe.
-
Configure stream:
- Menu
File→Open→Sensor Stream. - Lidar Model: select RS-E1.
- Menu
-
View point cloud: After OK you should see a colored point cloud in the black 3D grid. Rotate with left mouse, zoom with scroll wheel.
VII. Troubleshooting
- Q: Ping works but RSView is black?
- A: Check: 1) PC IP is exactly
192.168.1.102; 2) firewall is fully off.
- A: Check: 1) PC IP is exactly
- Q: Is a blinking green LED on the interface box normal?
- A: Yes. Blinking usually means the lidar is sending UDP point cloud packets at 10 Hz.
- Q: Lidar housing feels hot?
- A: E1R is high-power solid-state lidar; heat during operation is normal. Avoid enclosed, poorly ventilated runs; don’t touch the housing for long periods.
VIII. Shutdown and Maintenance
- Power-off order: Unplug the interface box DC power first, then close the software. Avoid hot-plugging the TE connector on the lidar side.
- Cleaning: For fingerprints on the window, use a lint-free cloth with a little alcohol; do not dry-wipe with paper towels to avoid scratching optical coatings.
Hope this guide helps you start exploring the RoboSense E1R! Questions welcome in the comments.