具身智能:零基础入门睿尔曼机械臂(四)—— 夹爪无响应?官方例程踩坑与排错实战
承接官方夹爪范例,本篇记录末端“能动臂、爪子完全不动”的完整排错链路:逐项核对脚本与示例、实测末端供电、还原官方范例缺的电压初始化,并追到示教器的通讯/波特配置。
一、前言
上一篇我们基于睿尔曼官方夹爪控制例程,拆解了夹爪“抓取-释放”的核心代码逻辑,从参数含义、函数作用到执行流程做了全维度解析,本以为只需按例程部署就能完成实操落地,却在实际安装夹爪并运行代码时遇到了核心问题——机械臂关节运动完全正常,但末端夹爪始终无任何物理动作。
指令一直返回的是超时(错误码-4),夹爪既不闭合也不张开,完全处于“瘫痪”状态。不同于上一篇梳理的“参数错误”“sleep时间不足”等基础问题,本次故障的根源隐藏在官方例程的初始化环节——遗漏了末端端口电压配置和通信协议初始化。本文将完整还原本次排错过程,从“软件复查→硬件测量→通信排查”三个维度定位问题,并给出可落地的解决方案,帮大家避开官方例程的“坑”。
二、问题发现:例程指令成功,夹爪却“纹丝不动”
2.1 实操环境确认
硬件:睿尔曼第三代机械臂(RM_65)+ 配套电动夹爪(已按手册完成末端机械安装,接口无松动);
软件:复用上一篇的夹爪控制例程,speed(500)、force(200)、IP/端口(192.168.1.18:8080)、time.sleep()时间(2秒)均确认无误;
网络:电脑与机械臂同网段,ping通无丢包,机械臂关节运动(movej)执行正常。
2.2 异常现象
运行例程后终端打印均为“成功”,但核心异常突出:
- 机械臂按指令完成“初始位→抓取位”的关节运动,终端打印“movej motion succeeded”;
- 夹爪抓取/释放指令返回-4超时错误码
- 夹爪全程无任何物理动作,既不闭合也不张开,手动轻掰夹爪无任何阻力(典型的未上电状态)。
我们逐一排除了上一篇总结的基础问题,确定故障并非代码调用错误,而是更深层的初始化缺失。
三、抽丝剥茧:从“软件复查”到“硬件+通信”的排错全过程
面对“指令成功但硬件无动作”的矛盾现象,我们按“软件→硬件→通信”的逻辑逐步溯源,最终定位到官方例程的两处关键遗漏。
3.1 第一步:软件层面——复查例程与SDK文档,无明显错误
首先聚焦“软件逻辑”做全面核查:
- 对比官方夹爪例程完整代码,确认
set_gripper_pick_on/set_gripper_release函数调用格式、参数范围均符合SDK要求; - 查阅睿尔曼SDK官方文档(
rm_robot_interface.py注释+官网技术手册),确认夹爪无需独立建立连接,只需机械臂连接成功即可; - 打印机械臂连接句柄(
handle.id≠-1)、API版本(rm_api_version()),均显示正常,无版本兼容问题。
软件层面未发现任何问题,我们判断故障大概率出在“硬件供电/通信”环节。
3.2 第二步:硬件层面——万用表实测,末端端口电压为0
针对“夹爪无上电迹象”(手动可轻易掰动),我们对机械臂末端夹爪连接端口做了硬件测量:
- 断电状态下,按手册核对夹爪供电接口与机械臂末端端口的针脚定义,确认接线匹配;

- 上电后,用万用表测量末端端口的电源输出引脚,发现电压值为0V(正常应为12V/24V,适配夹爪额定供电)。
这一发现直接指向核心线索:夹爪未获得供电,即便指令“成功”,硬件也无执行基础。
3.3 第三步:溯源电压问题——官方例程遗漏电压初始化函数
找到“电压为0”的线索后,我们重新梳理SDK函数列表,发现睿尔曼SDK中提供了rm_set_end_out_voltage(注:函数名以实际SDK为准)等修改末端端口输出电压的函数,但在官方夹爪控制例程的__init__初始化函数中,仅执行了机械臂连接操作,完全未调用该电压配置函数,导致末端端口默认输出0V,夹爪无供电。
我们在初始化函数中补充调用电压配置函数(设置为24V,适配夹爪额定电压),重新运行例程:
- 夹爪立即出现上电反应:自动闭环→张开至最大行程,手动掰动夹爪有明显阻力(闭环锁定状态);
- 但新问题出现:执行
set_gripper_pick_on/set_gripper_release指令,夹爪仍不执行抓取/释放动作。
3.4 第四步:通信层面——示教器排查,通信协议未配置
夹爪上电但指令不执行,说明“供电问题解决,但通信异常”。我们进入机械臂示教器,核查夹爪相关配置项:
- 找到“末端执行器→通信配置”页面,发现波特率、校验位等参数与夹爪手册要求的115200波特匹配并未启动
- 确认核心问题:夹爪与机械臂通信协议未初始化,导致机械臂下发的指令无法被夹爪识别,即便供电正常,夹爪也无法响应指令。
至此,问题根源完全明确:官方夹爪例程仅关注“夹爪指令调用”,却遗漏了“末端端口电压初始化”和“通信协议配置”两个关键前提,前者导致夹爪无供电,后者导致指令无法传递。
四、落地解决方案:分维度解决供电与通信问题
针对排查出的两大核心问题,我们整理了两种可落地的解决方案,适配不同使用场景(快速调试/自动化控制)。
4.1 维度1:末端端口电源输出配置
夹爪的正常工作依赖12V/24V的末端供电,需先完成电压配置,以下是两种方法:
方法1:示教器直接配置(快速调试)
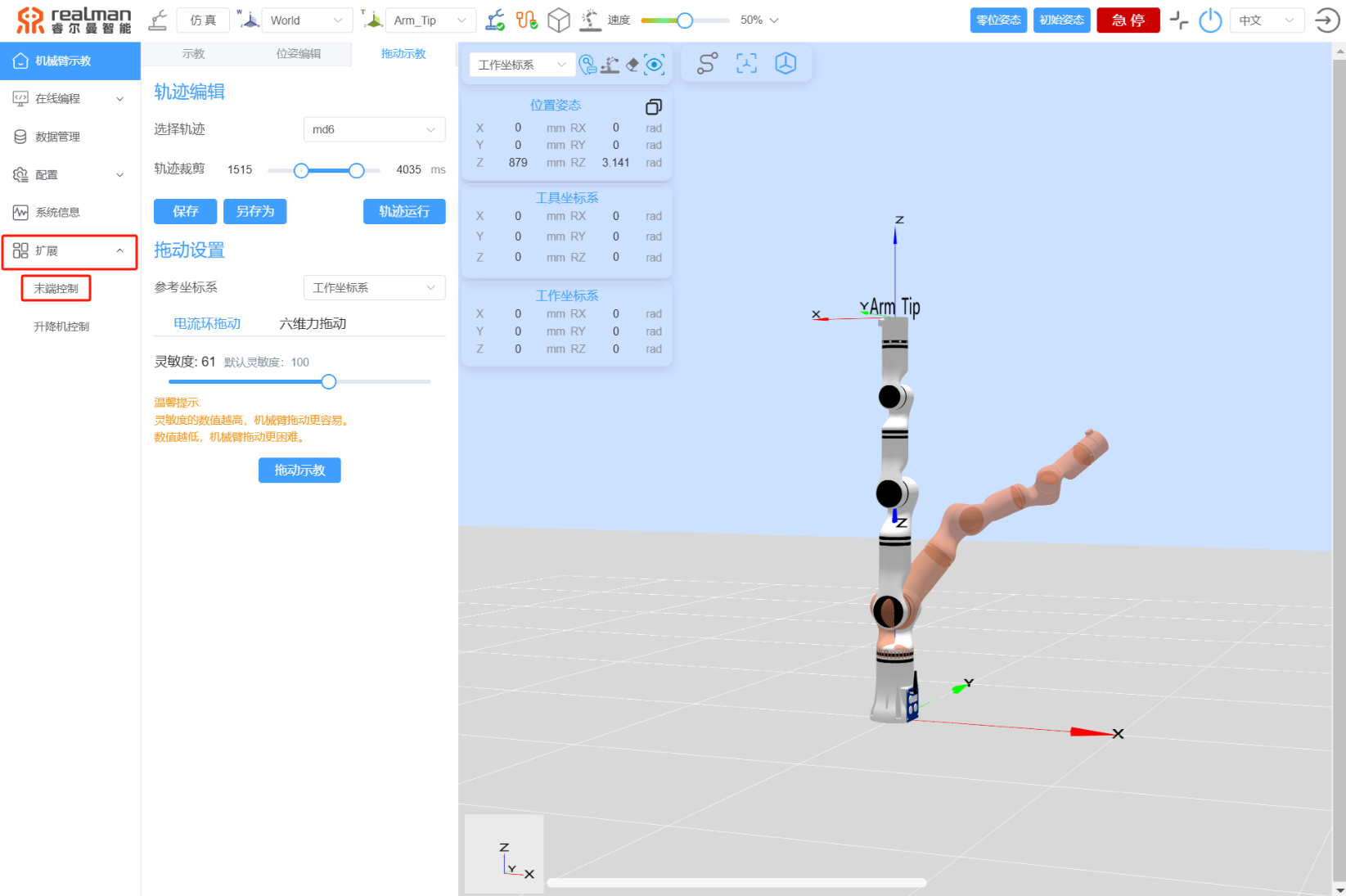
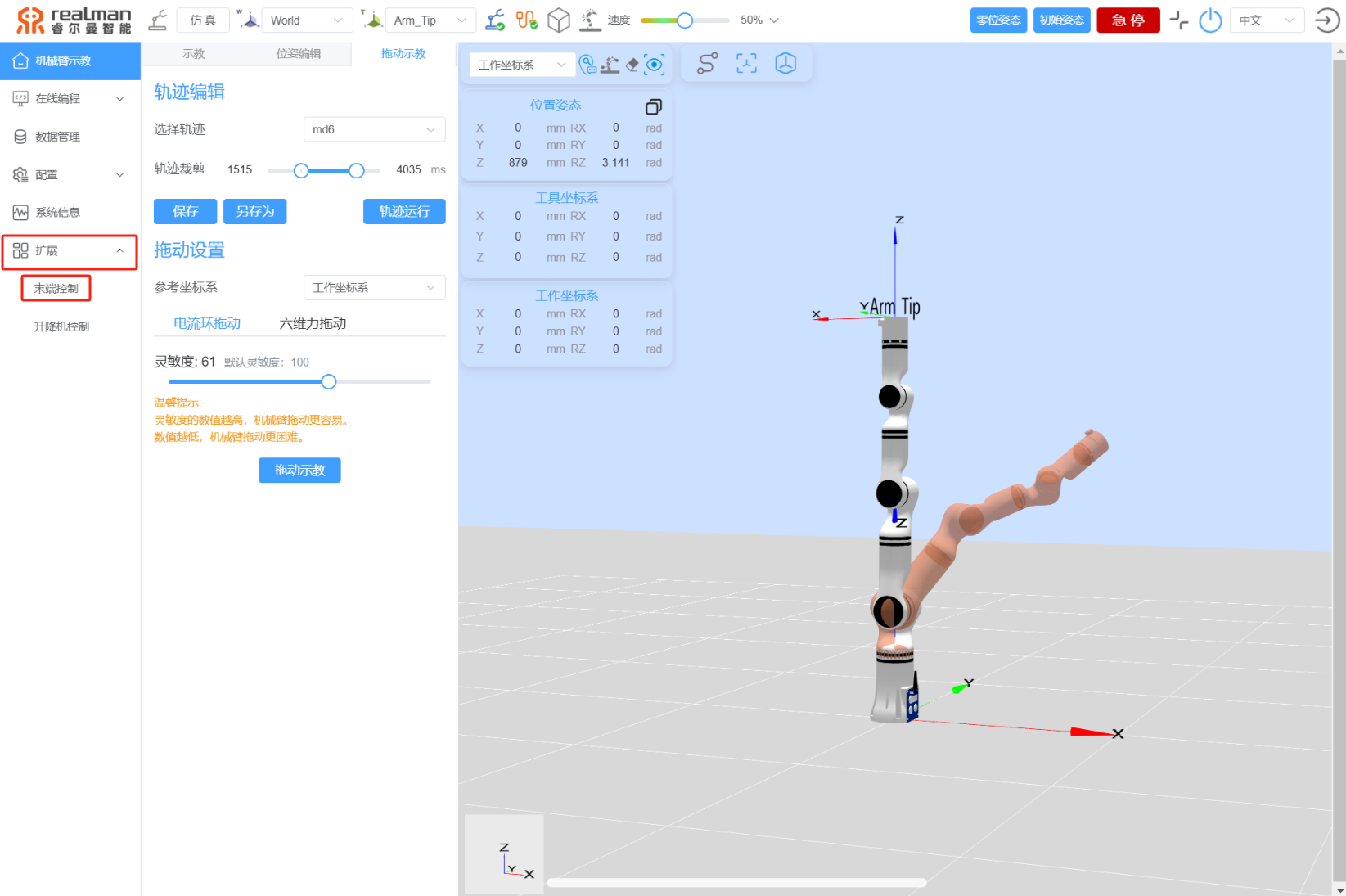
- 进入机械臂示教器,找到“扩展→末端控制”页面;(博主这边没有连接机械臂不好截图)
- 根据夹爪硬件手册,选择“末端输出电压”为12V或24V(原本为0V)(建议优先匹配夹爪额定电压);
- 保存配置并重启机械臂,再次测量末端端口电压,确认数值与设置一致。
方法2:代码中调用电压配置函数(自动化控制)
在机械臂初始化函数(__init__)中补充电压配置逻辑,确保每次连接机械臂时自动配置电压,代码示例如下:
def __init__(self, ip, port, level=3, mode=2, gripper_voltage=24):
"""
Initialize and connect to the robotic arm (and gripper), add gripper voltage configuration.
Args:
ip (str): IP address of the robot arm.
port (int): Port number.
level (int, optional): Connection level. Defaults to 3.
mode (int, optional): Thread mode (0: single, 1: dual, 2: triple). Defaults to 2.
gripper_voltage (int, optional): Gripper rated voltage (12/24). Defaults to 24.
"""
self.thread_mode = rm_thread_mode_e(mode)
self.robot = RoboticArm(self.thread_mode)
self.handle = self.robot.rm_create_robot_arm(ip, port, level)
if self.handle.id == -1:
print("\nFailed to connect to the robot arm\n")
exit(1)
else:
print(f"\nSuccessfully connected to the robot arm: {self.handle.id}\n")
# 补充:配置末端端口输出电压为夹爪额定电压
voltage_result = =self.robot.rm_set_tool_voltage(2)
if voltage_result == 0:
print(f"\nSet gripper voltage to 12V succeeded\n")
else:
print(f"\nSet gripper voltage failed, Error code: {voltage_result}\n")
4.2 维度2:通信协议(波特率等)配置
夹爪与机械臂的通信依赖匹配的波特率、校验位等参数,当前睿尔曼SDK暂未提供通信协议配置的函数,需通过示教器完成配置:
- 进入示教器“末端执行器→通信配置”页面;
- 查阅夹爪硬件手册,确认要求的通信参数(如波特率115200、数据位8、校验位None、停止位1);
- 将示教器中的参数修改为与夹爪匹配的值,保存并重启机械臂;
- 验证:重启后夹爪上电,执行抓取/释放指令,夹爪可正常开合。
4.3 解决方案组合建议
- 快速调试场景:示教器直接配置电压+通信协议,无需修改代码,适合临时测试;
- 自动化部署场景:代码中调用电压配置函数(确保每次连接自动设压)+ 示教器一次性配置通信协议(配置后无需重复修改),适合批量/重复执行的场景。
五、总结与经验沉淀
本次排错过程,核心解决了睿尔曼官方夹爪例程“初始化环节缺失”的问题,也沉淀了机械臂末端执行器故障排查的通用思路:
5.1 问题根源总结
官方夹爪控制例程仅关注“夹爪指令调用”,却遗漏了两个基础前提:
- 供电前提:末端端口需主动配置12V/24V输出电压,否则夹爪无供电,指令无物理执行基础;
- 通信前提:夹爪与机械臂的通信协议(波特率等)需匹配,否则指令无法被夹爪识别。
5.2 排错思路
遇到“指令成功但硬件无动作”的故障,可按“软件→硬件→通信”的顺序排查:
- 软件层:复查代码调用、参数、SDK文档,排除语法/逻辑错误;
- 硬件层:用万用表测量供电电压、检查接线/安装,排除“无电/接触不良”;
- 通信层:通过示教器核查协议配置,排除“指令无法传递”。
5.3 实操建议
- 不要完全依赖官方例程:工业级设备的例程常简化初始化步骤,需结合硬件手册补充配置;
- 硬件测量是关键:万用表等工具能快速定位供电问题,比单纯看日志更高效;
- 示教器是核心调试入口:机械臂的底层配置(电压、波特率)多在示教器中,需熟悉示教器操作逻辑。
若后续睿尔曼更新SDK,新增通信协议配置的函数,可将通信配置也整合到代码初始化中,实现“一键连接+配置+控制”的全自动化流程。本次排错也印证了:机械臂控制不仅是“代码调用”,更是“软件+硬件+通信”的协同,唯有兼顾全链路,才能真正落地实操。
具身智能:零基礎入門睿爾曼機械臂(四)—— 夾爪無響應?官方例程踩坑與排錯實戰
接續官方夾爪例程,整理「機械臂會動但夾爪不動」的真實除錯路徑:軟體對照 SDK、電表量末端電壓,補上範例遺漏的輸出初始化,並回溯示教器通訊與 baud 設定問題。
來源:https://blog.csdn.net/2403_87969572/article/details/155957848
抓取時間(ISO本地):2026-05-18 05:17:19
文章目錄
一、前言
上一篇我們基於睿爾曼官方夾爪控制例程,拆解了夾爪“抓取-釋放”的核心代碼邏輯,從參數含義、函數作用到執行流程做了全維度解析,本以為只需按例程部署就能完成實操落地,卻在實際安裝夾爪並運行代碼時遇到了核心問題——機械臂關節運動完全正常,但末端夾爪始終無任何物理動作。
指令一直返回的是超時(錯誤碼-4),夾爪既不閉合也不張開,完全處於“癱瘓”狀態。不同於上一篇梳理的“參數錯誤”“sleep時間不足”等基礎問題,本次故障的根源隱藏在官方例程的初始化環節——遺漏了末端端口電壓配置和通信協議初始化。本文將完整還原本次排錯過程,從“軟件複查→硬件測量→通信排查”三個維度定位問題,並給出可落地的解決方案,幫大家避開官方例程的“坑”。
二、問題發現:例程指令成功,夾爪卻“紋絲不動”
2.1 實操環境確認
硬件:睿爾曼第三代機械臂(RM_65)+ 配套電動夾爪(已按手冊完成末端機械安裝,接口無鬆動);
軟件:複用上一篇的夾爪控制例程,speed(500)、force(200)、IP/端口(192.168.1.18:8080)、time.sleep()時間(2秒)均確認無誤;
網絡:電腦與機械臂同網段,ping通無丟包,機械臂關節運動(movej)執行正常。
2.2 異常現象
運行例程後終端打印均為“成功”,但核心異常突出:
- 機械臂按指令完成“初始位→抓取位”的關節運動,終端打印“movej motion succeeded”;
- 夾爪抓取/釋放指令返回-4超時錯誤碼
- 夾爪全程無任何物理動作,既不閉合也不張開,手動輕掰夾爪無任何阻力(典型的未上電狀態)。
我們逐一排除了上一篇總結的基礎問題,確定故障並非代碼調用錯誤,而是更深層的初始化缺失。
三、抽絲剝繭:從“軟件複查”到“硬件+通信”的排錯全過程
面對“指令成功但硬件無動作”的矛盾現象,我們按“軟件→硬件→通信”的邏輯逐步溯源,最終定位到官方例程的兩處關鍵遺漏。
3.1 第一步:軟件層面——複查例程與SDK文檔,無明顯錯誤
首先聚焦“軟件邏輯”做全面核查:
- 對比官方夾爪例程完整代碼,確認
set_gripper_pick_on/set_gripper_release函數調用格式、參數範圍均符合SDK要求; - 查閱睿爾曼SDK官方文檔(
rm_robot_interface.py註釋+官網技術手冊),確認夾爪無需獨立建立連接,只需機械臂連接成功即可; - 打印機械臂連接句柄(
handle.id≠-1)、API版本(rm_api_version()),均顯示正常,無版本兼容問題。
軟件層面未發現任何問題,我們判斷故障大概率出在“硬件供電/通信”環節。
3.2 第二步:硬件層面——萬用表實測,末端端口電壓為0
針對“夾爪無上電跡象”(手動可輕易掰動),我們對機械臂末端夾爪連接端口做了硬件測量:
- 斷電狀態下,按手冊核對夾爪供電接口與機械臂末端端口的針腳定義,確認接線匹配;
- 上電後,用萬用表測量末端端口的電源輸出引腳,發現電壓值為0V(正常應為12V/24V,適配夾爪額定供電)。
這一發現直接指向核心線索:夾爪未獲得供電,即便指令“成功”,硬件也無執行基礎。
3.3 第三步:溯源電壓問題——官方例程遺漏電壓初始化函數
找到“電壓為0”的線索後,我們重新梳理SDK函數列表,發現睿爾曼SDK中提供了rm_set_end_out_voltage(注:函數名以實際SDK為準)等修改末端端口輸出電壓的函數,但在官方夾爪控制例程的__init__初始化函數中,僅執行了機械臂連接操作,完全未調用該電壓配置函數,導致末端端口默認輸出0V,夾爪無供電。
我們在初始化函數中補充調用電壓配置函數(設置為24V,適配夾爪額定電壓),重新運行例程:
- 夾爪立即出現上電反應:自動閉環→張開至最大行程,手動掰動夾爪有明顯阻力(閉環鎖定狀態);
- 但新問題出現:執行
set_gripper_pick_on/set_gripper_release指令,夾爪仍不執行抓取/釋放動作。
3.4 第四步:通信層面——示教器排查,通信協議未配置
夾爪上電但指令不執行,說明“供電問題解決,但通信異常”。我們進入機械臂示教器,核查夾爪相關配置項:
- 找到“末端執行器→通信配置”頁面,發現波特率、校驗位等參數與夾爪手冊要求的115200波特匹配並未啟動
- 確認核心問題:夾爪與機械臂通信協議未初始化,導致機械臂下發的指令無法被夾爪識別,即便供電正常,夾爪也無法響應指令。
至此,問題根源完全明確:官方夾爪例程僅關注“夾爪指令調用”,卻遺漏了“末端端口電壓初始化”和“通信協議配置”兩個關鍵前提,前者導致夾爪無供電,後者導致指令無法傳遞。
四、落地解決方案:分維度解決供電與通信問題
針對排查出的兩大核心問題,我們整理了兩種可落地的解決方案,適配不同使用場景(快速調試/自動化控制)。
4.1 維度1:末端端口電源輸出配置
夾爪的正常工作依賴12V/24V的末端供電,需先完成電壓配置,以下是兩種方法:
方法1:示教器直接配置(快速調試)
- 進入機械臂示教器,找到“擴展→末端控制”頁面;(博主這邊沒有連接機械臂不好截圖)
- 根據夾爪硬件手冊,選擇“末端輸出電壓”為12V或24V(原本為0V)(建議優先匹配夾爪額定電壓);
- 保存配置並重啟機械臂,再次測量末端端口電壓,確認數值與設置一致。
方法2:代碼中調用電壓配置函數(自動化控制)
在機械臂初始化函數(__init__)中補充電壓配置邏輯,確保每次連接機械臂時自動配置電壓,代碼示例如下:
def __init__(self, ip, port, level=3, mode=2, gripper_voltage=24):
"""
Initialize and connect to the robotic arm (and gripper), add gripper voltage configuration.
Args:
ip (str): IP address of the robot arm.
port (int): Port number.
level (int, optional): Connection level. Defaults to 3.
mode (int, optional): Thread mode (0: single, 1: dual, 2: triple). Defaults to 2.
gripper_voltage (int, optional): Gripper rated voltage (12/24). Defaults to 24.
"""
self.thread_mode = rm_thread_mode_e(mode)
self.robot = RoboticArm(self.thread_mode)
self.handle = self.robot.rm_create_robot_arm(ip, port, level)
if self.handle.id == -1:
print("\nFailed to connect to the robot arm\n")
exit(1)
else:
print(f"\nSuccessfully connected to the robot arm: {self.handle.id}\n")
# 補充:配置末端端口輸出電壓為夾爪額定電壓
voltage_result = =self.robot.rm_set_tool_voltage(2)
if voltage_result == 0:
print(f"\nSet gripper voltage to 12V succeeded\n")
else:
print(f"\nSet gripper voltage failed, Error code: {voltage_result}\n")
4.2 維度2:通信協議(波特率等)配置
夾爪與機械臂的通信依賴匹配的波特率、校驗位等參數,當前睿爾曼SDK暫未提供通信協議配置的函數,需通過示教器完成配置:
- 進入示教器“末端執行器→通信配置”頁面;
- 查閱夾爪硬件手冊,確認要求的通信參數(如波特率115200、數據位8、校驗位None、停止位1);
- 將示教器中的參數修改為與夾爪匹配的值,保存並重啟機械臂;
- 驗證:重啟後夾爪上電,執行抓取/釋放指令,夾爪可正常開合。
4.3 解決方案組合建議
- 快速調試場景:示教器直接配置電壓+通信協議,無需修改代碼,適合臨時測試;
- 自動化部署場景:代碼中調用電壓配置函數(確保每次連接自動設壓)+ 示教器一次性配置通信協議(配置後無需重複修改),適合批量/重複執行的場景。
五、總結與經驗沉澱
本次排錯過程,核心解決了睿爾曼官方夾爪例程“初始化環節缺失”的問題,也沉澱了機械臂末端執行器故障排查的通用思路:
5.1 問題根源總結
官方夾爪控制例程僅關注“夾爪指令調用”,卻遺漏了兩個基礎前提:
- 供電前提:末端端口需主動配置12V/24V輸出電壓,否則夾爪無供電,指令無物理執行基礎;
- 通信前提:夾爪與機械臂的通信協議(波特率等)需匹配,否則指令無法被夾爪識別。
5.2 排錯思路
遇到“指令成功但硬件無動作”的故障,可按“軟件→硬件→通信”的順序排查:
- 軟件層:複查代碼調用、參數、SDK文檔,排除語法/邏輯錯誤;
- 硬件層:用萬用表測量供電電壓、檢查接線/安裝,排除“無電/接觸不良”;
- 通信層:通過示教器核查協議配置,排除“指令無法傳遞”。
5.3 實操建議
- 不要完全依賴官方例程:工業級設備的例程常簡化初始化步驟,需結合硬件手冊補充配置;
- 硬件測量是關鍵:萬用表等工具能快速定位供電問題,比單純看日誌更高效;
- 示教器是核心調試入口:機械臂的底層配置(電壓、波特率)多在示教器中,需熟悉示教器操作邏輯。
若後續睿爾曼更新SDK,新增通信協議配置的函數,可將通信配置也整合到代碼初始化中,實現“一鍵連接+配置+控制”的全自動化流程。本次排錯也印證了:機械臂控制不僅是“代碼調用”,更是“軟件+硬件+通信”的協同,唯有兼顧全鏈路,才能真正落地實操。
Embodied intelligence: Realman arm zero-to-one (4)—gripper dead? demo pitfalls and debug
Field report from Realman tooling: joints move yet the gripper stays idle—checking SDK snippets, metering end-effector rails, patching missing initialization calls, and fixing teach pendant comms baud settings.
Captured at (ISO local): 2026-05-18 05:17:19
I. Foreword
In the last post we walked through Realman’s official gripper demo—pick/release calls, parameters, and flow. We expected plug-and-play after mounting the gripper, but hit a hard blocker: joint motion was fine, yet the gripper never moved physically.
Commands kept returning timeout (error code -4)—no close, no open, total “paralysis.” Unlike simple mistakes (wrong parameters, short sleep), this traced to missing init in the official demo: tool voltage and serial protocol were never set. This article replays the full debug path—software → hardware → comms—and gives fixes so you can skip the same traps.
II. Symptom: “success” in logs, gripper won’t move
2.1 Test setup
Hardware: third-gen RM_65 + electric gripper (mechanically installed per manual, connectors tight);
Software: same gripper demo as before—speed 500, force 200, IP/port 192.168.1.18:8080, time.sleep(2) verified;
Network: same subnet, ping clean, movej works.
2.2 What we saw
Terminal looked partly healthy, but the gripper did nothing:
- Arm moved home → grasp pose; “movej motion succeeded” printed;
- Pick/release returned -4 timeout;
- No jaw motion; fingers moved freely by hand—classic unpowered gripper.
We ruled out the basics from the previous article—this was deeper missing initialization.
III. Debug trail: software → hardware → comms
“Commands OK but hardware silent” → we traced software → hardware → communication and found two gaps in the official demo.
3.1 Step 1: software—demo and SDK look fine
- Compared full official gripper script—
set_gripper_pick_on/set_gripper_releaseformat and ranges match the SDK; - Read
rm_robot_interface.pyand the web manual—no separate gripper connection; arm handle is enough; handle.id ≠ -1,rm_api_version()OK—no version clash.
Software looked clean → suspect power or serial.
3.2 Step 2: hardware—0 V at the tool port
Gripper felt unpowered (easy to move by hand):
- Power off, verified pinout vs manual;
- Power on, multimeter on tool supply pins: 0 V (expect 12 V or 24 V per gripper rating).
No power → no motion, regardless of “success” in software.
3.3 Step 3: root cause—demo skips voltage init
SDK lists rm_set_end_out_voltage (exact name per your SDK build) to set tool voltage, but the demo’s __init__ only connects the arm—never sets voltage → port stays 0 V.
We added voltage setup (24 V for our gripper) in init and re-ran:
- Gripper powered up: closed loop, opened to max stroke, noticeable resistance when pushed—closed-loop hold;
- But
set_gripper_pick_on/set_gripper_releasestill did not open/close on command.
3.4 Step 4: comms—protocol not configured in pendant
Powered but not obeying commands → comms. In the pendant under end-effector settings:
- End-effector → communication: baud/check/etc. did not match the gripper manual (115200 required) and was not enabled;
- Conclusion: protocol not initialized—the arm’s commands never reached the gripper.
Full picture: the official demo only calls gripper APIs and skips (1) tool voltage and (2) serial protocol—no power, then no parsing.
IV. Fixes: power and communication
4.1 Axis 1: tool-port supply voltage
Gripper needs 12 V or 24 V at the flange—configure first.
Method 1: pendant (quick test)
- Pendant → Extensions → end control (no arm connected here—no screenshots from author);
- Set end output voltage to 12 V or 24 V (was 0 V)—match gripper nameplate;
- Save, reboot arm, re-measure port voltage.
Method 2: voltage API in code (automation)
Add voltage setup in __init__ so every connect sets supply:
def __init__(self, ip, port, level=3, mode=2, gripper_voltage=24):
"""
Initialize and connect to the robotic arm (and gripper), add gripper voltage configuration.
Args:
ip (str): IP address of the robot arm.
port (int): Port number.
level (int, optional): Connection level. Defaults to 3.
mode (int, optional): Thread mode (0: single, 1: dual, 2: triple). Defaults to 2.
gripper_voltage (int, optional): Gripper rated voltage (12/24). Defaults to 24.
"""
self.thread_mode = rm_thread_mode_e(mode)
self.robot = RoboticArm(self.thread_mode)
self.handle = self.robot.rm_create_robot_arm(ip, port, level)
if self.handle.id == -1:
print("\nFailed to connect to the robot arm\n")
exit(1)
else:
print(f"\nSuccessfully connected to the robot arm: {self.handle.id}\n")
# 补充:配置末端端口输出电压为夹爪额定电压
voltage_result = =self.robot.rm_set_tool_voltage(2)
if voltage_result == 0:
print(f"\nSet gripper voltage to 12V succeeded\n")
else:
print(f"\nSet gripper voltage failed, Error code: {voltage_result}\n")
4.2 Axis 2: baud rate and serial settings
Gripper talk needs matching baud, data bits, parity, stop bits. The SDK may not expose all of this yet—use the pendant:
- End-effector → communication;
- From the gripper manual (e.g. 115200, 8N1);
- Enter matching values, save, reboot;
- Verify: powered gripper, pick/release commands move the jaws.
4.3 Recommended combo
- Quick lab test: voltage + serial in pendant only;
- Automation: voltage in code on every connect + one-time pendant serial setup for production runs.
V. Lessons learned
5.1 Root causes
The official gripper demo assumes two prerequisites that it never sets:
- Power: actively enable 12 V / 24 V on the tool port—default 0 V means dead gripper;
- Comms: baud and framing must match the gripper or commands are ignored.
5.2 Debug order
For “software OK, hardware still”:
- Software: calls, parameters, SDK docs;
- Hardware: multimeter on supply, wiring, mechanical install;
- Comms: pendant protocol page.
5.3 Practical tips
- Don’t trust demos blindly—industrial examples often skip init; read the hardware manual;
- Measure voltage—faster than log-chasing alone;
- Learn the pendant—voltage and baud often live only there until the SDK catches up.
If a future SDK adds serial setup APIs, fold that into init for true one-shot connect-and-run. Arm control is software + hardware + communication—all three must be right before the gripper moves in the real world.