具身智能:零基础入门睿尔曼机械臂(一)——从硬件准备到首次运行全攻略
零基础入门睿尔曼协作机械臂:从核心部件、底座与末端安装,到24V接线、开机指示灯含义,以及有线/无线示教器连接与拖动示教,覆盖RM65/RM75/RML63全系列首次上手指南。
前言
作为刚接触睿尔曼协作机器人的新手,是否对着包装箱里的部件感到无从下手?别担心!这篇入门博客将以官方硬件准备手册为基础,带大家一步步完成机器人的组装、接线、开机与示教器连接,无论是操作人员、技术人员还是开发者,都能快速上手RM65、RM75、RML63等全系列睿尔曼机械臂。
一、先搞懂:睿尔曼机器人核心组成与接口
在动手操作前,我们先熟悉机器人的核心部件和接口功能,这是后续操作的基础。
1. 核心部件
一套完整的睿尔曼协作机器人包含机械臂本体、控制器(分第二代和第三代)、DC24V供电线缆、网线,以及用于安装的螺栓和扳手等配件。其中第三代控制器相比第二代,新增了状态指示灯,同时简化了网口设计,使用更便捷。

2. 关键接口功能详解
控制器面板的接口是机器人与外界连接的核心,每个接口的用途都至关重要:
- 开关:控制机器人电源,开启后会亮起蓝灯,直观判断电源状态;
- 电源接口:插入DC24V电源线缆,为机器人提供动力;
- 复用IO接口:可引出RS485、I/O等信号,支持连接外置急停按钮盒等设备;
- 无线网络:百兆Wi-Fi模块,用于无线通讯连接;
- USB接口:扩展接口,可外接蓝牙手柄接收器等外设;
- 有线网口:千兆网口,用于稳定的有线通讯;
- 交互RGB指示灯:机器人状态的”晴雨表”,不同颜色对应不同工作状态:
- 蓝色:控制器启动初始化中;
- 白色:各关节启动初始化中;
- 绿色:机械臂正常运行,可开始工作;
- 黄色:普通故障警告,需立即处理;
- 红色:严重故障,需紧急停机排查。

二、动手安装:1人即可完成的快速组装
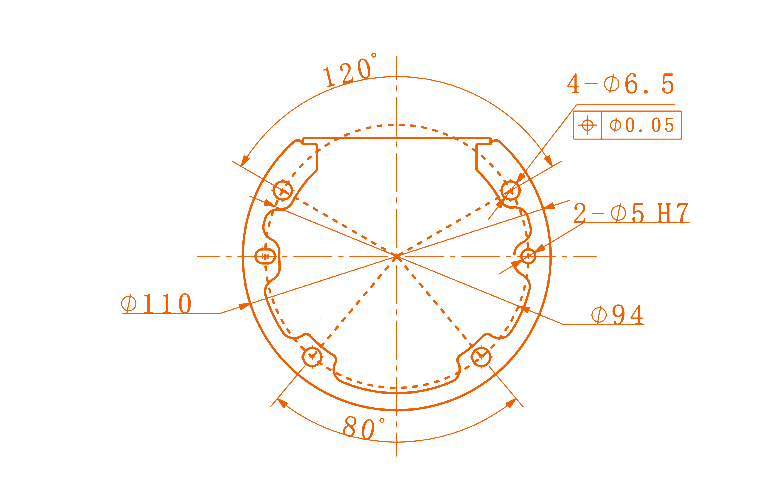
睿尔曼机械臂属于超轻量设计,以RM65系列为例,自重仅7.2kg,底座直径110mm,单人就能完成安装,其他系列安装流程基本一致。
1. 底座安装:固定机械臂基础
- 从包装箱中取出机械臂,找到底座安装位置,确认安装面平整牢固;
- 准备4个M6内六角螺栓和配套的M6内六角扳手;
- 对准机械臂底座的安装孔位,用螺栓将机械臂固定在预设的安装面上,拧紧螺栓确保稳固,避免运行时晃动。

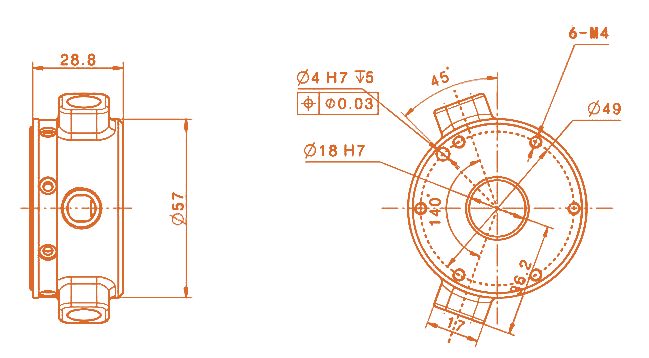
2. 末端扩展工具安装:适配个性化需求
机械臂末端提供标准法兰接口,法兰盘上在Ф49mm分度圆上均匀分布着6个M4螺纹孔,适配大多数末端工具:
- 根据需要安装的夹具、吸盘等末端工具的安装尺寸,对准法兰盘的螺纹孔;
- 用匹配的螺栓固定末端工具,确保安装牢固,避免作业时脱落。
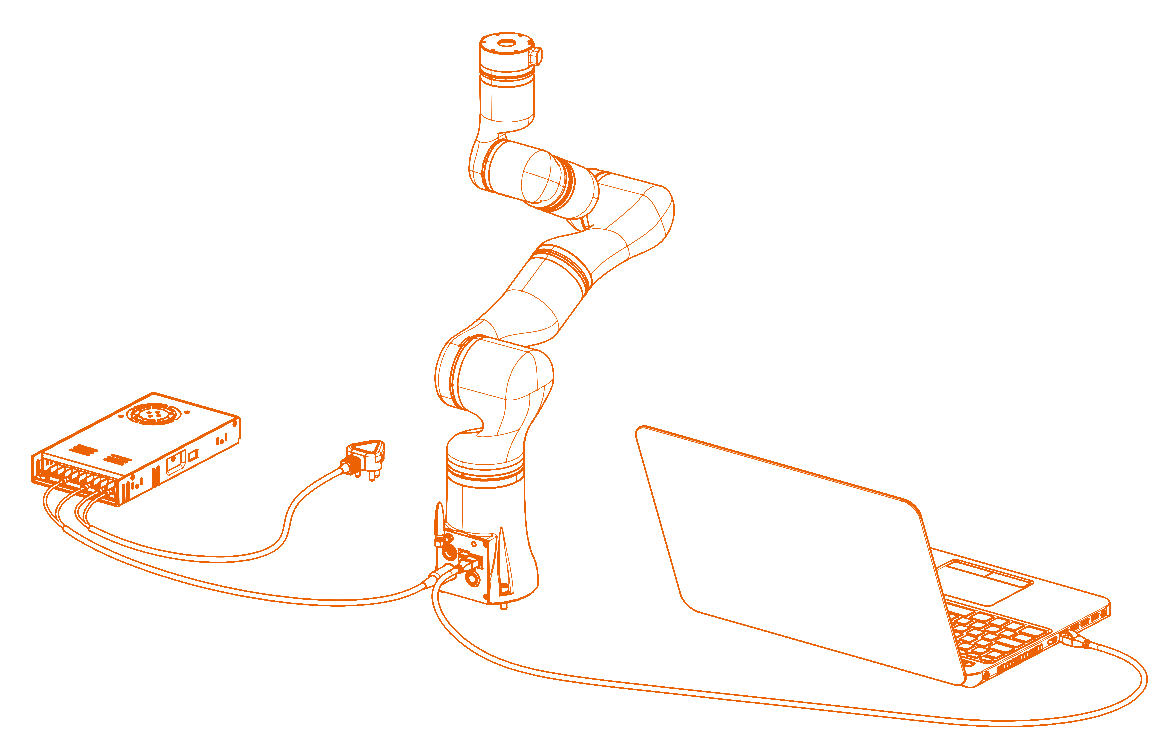
三、接线与开机
接线和开机是机器人启动的关键环节,每一步都要严格遵循规范,避免设备损坏或安全隐患。
1. 接线前的准备
- 准备DC24V供电电源,电压范围建议20~27V(极限可到30V),推荐使用600W以上、支持打嗝模式和1S恒流输出功能的开关电源,保证供电稳定;
- 检查机器人的工作环境:需保持干燥清洁,避免暴露在灰尘过多或超出IP54等级的潮湿环境中,若环境存在传导性灰尘,需额外做好防护。
2. 接线步骤
- 取出包装箱中的DC24V电源线缆,线缆棕色线芯为正极,蓝色线芯为负极;
- 将电源线连接到控制器面板左下角的2芯航插电源接口,确保正负极连接正确;
- 若无外置设备(如急停按钮盒、蓝牙手柄),仅需额外连接网线(有线通讯)或后续通过Wi-Fi连接(无线通讯)即可。
3. 开机前的安全检查
- 确认电源线与电源插头、控制器接口连接牢固,无松动;
- 检查控制器电源开关处于关闭状态(未弹起);
- 清理机械臂周围环境,确保无人员、障碍物,避免开机后碰撞;
- 再次确认电源为DC24V直流电源,符合电压要求。
4. 开机流程与状态判断
- 按下控制器上的电源开关,此时开关背景灯变为蓝色,说明机械臂已上电;
- 控制器右上角指示灯变为蓝色,代表控制器开始启动;
- 指示灯变为白色,机械臂各关节进入初始化阶段;
- 指示灯变为绿色闪烁状态,说明机器人启动完成,可正常工作(整个启动过程约50秒)。
四、示教器连接:全平台适配,有线无线都能行
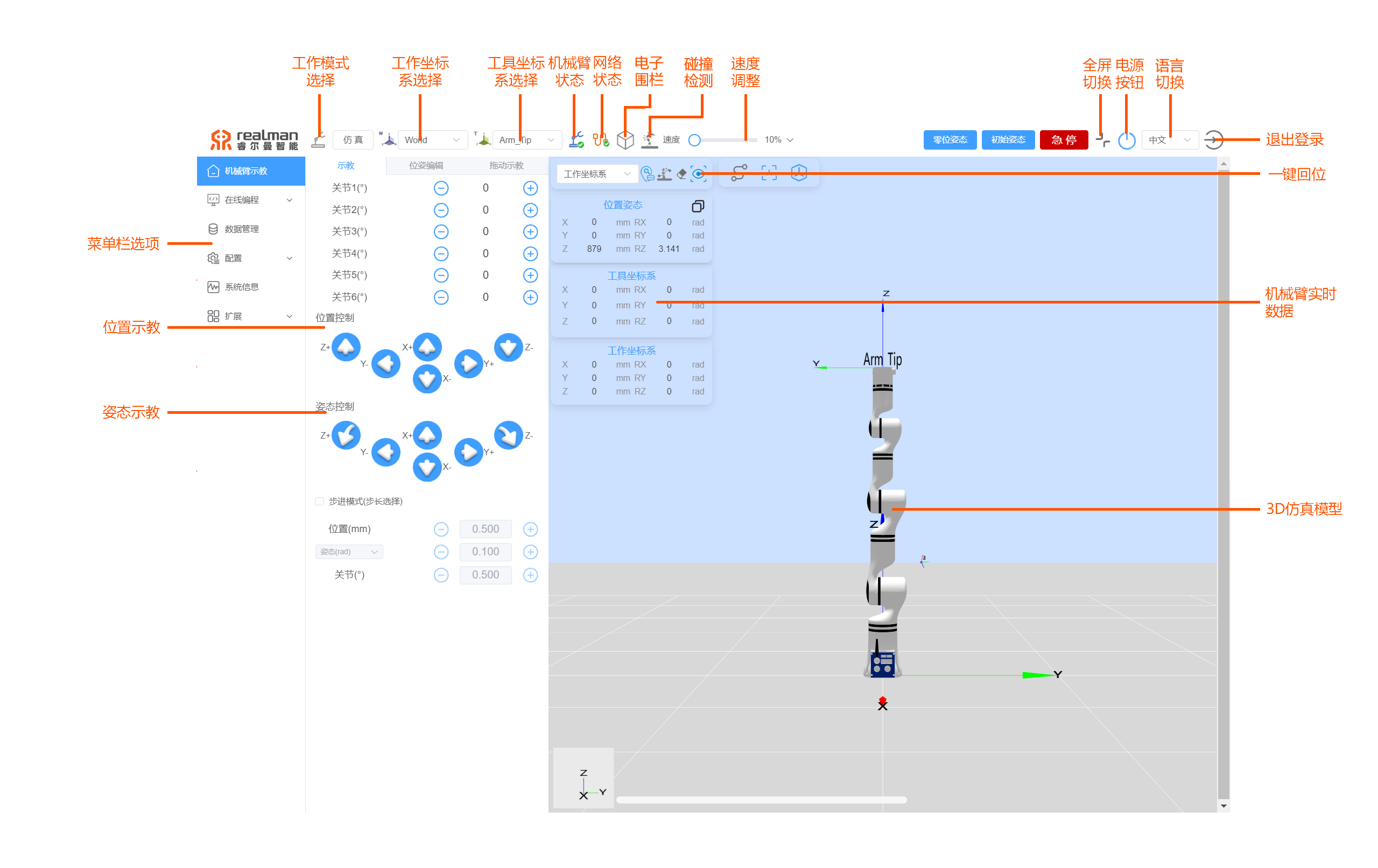
睿尔曼机械臂的示教器是web端软件,无需安装,浏览器直接登录即可,支持安卓、Windows、苹果、Linux等全平台设备,推荐使用谷歌浏览器以保证兼容性。
1. 有线连接:稳定优先,适合精准操作
适合需要稳定通讯的场景(如程序编写、精准示教),步骤如下:
-
将Windows电脑(或其他有线设备)通过网线与机器人控制器的千兆网口连接;
-
配置电脑IP地址:
- 右击电脑右下角WiFi图标,打开”网络和Internet设置”(Win11需先点击”高级网络设置”,再选择”更多网络适配器选项”);
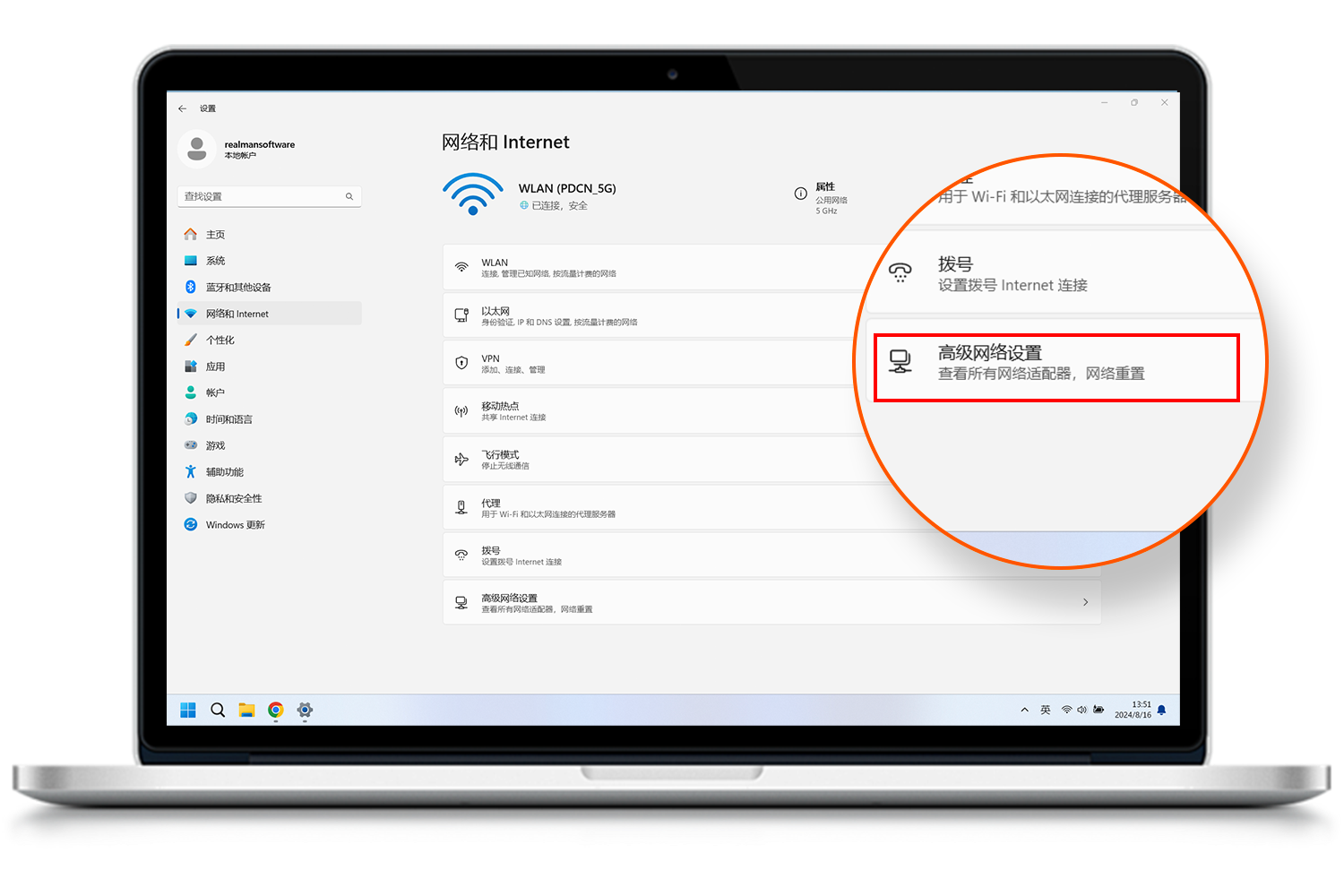
- 找到”以太网”,点击其下拉页面中”更多适配器选项”后的”编辑”;
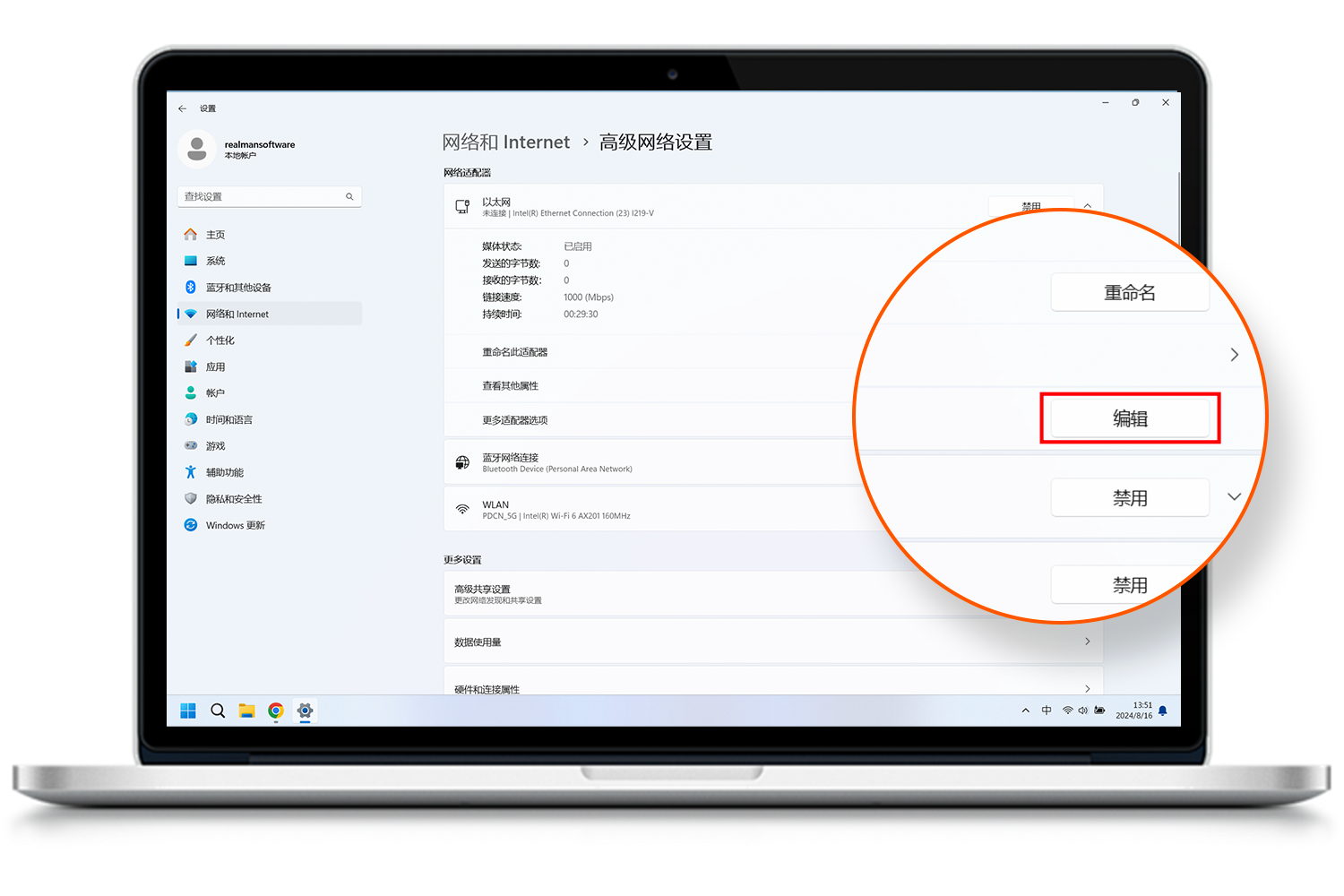
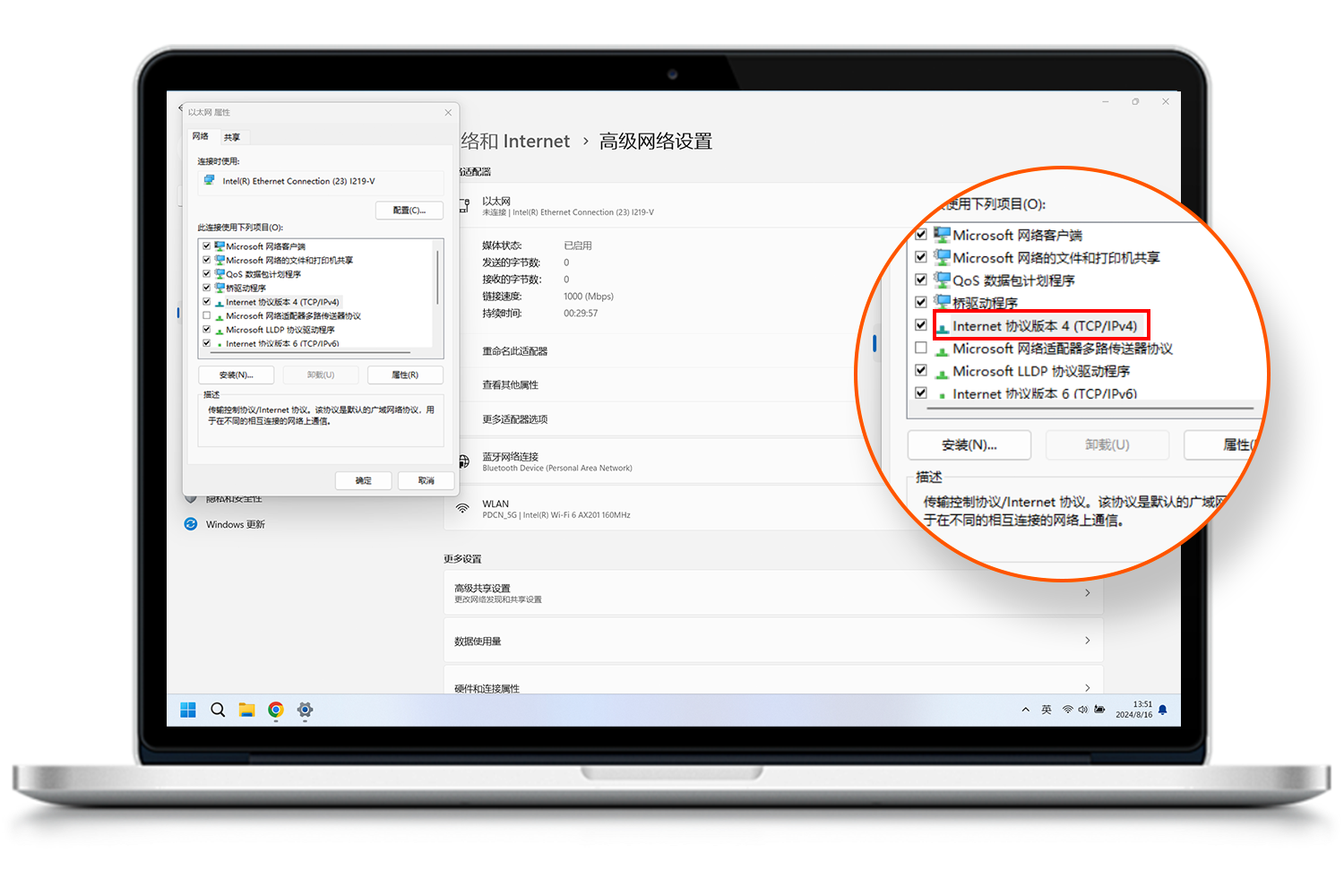
- 在弹出的对话框中,选中”Internet协议版本4”,点击”属性”;
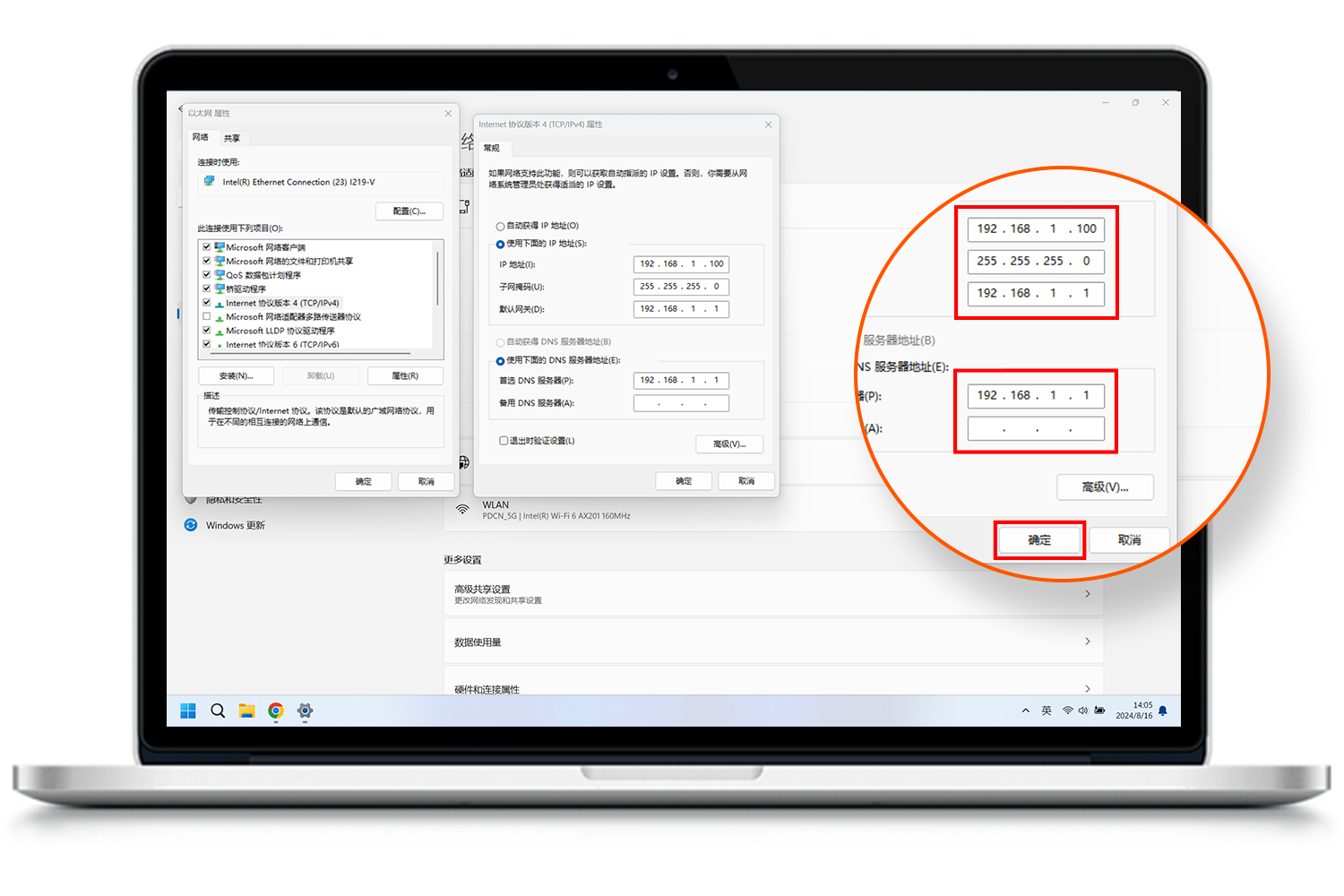
- 将IP地址配置到192.168.1.xx网段(xx为除18外的任意数字,推荐192.168.1.100),子网掩码、网关等按常规局域网配置;
- 右击电脑右下角WiFi图标,打开”网络和Internet设置”(Win11需先点击”高级网络设置”,再选择”更多网络适配器选项”);
-
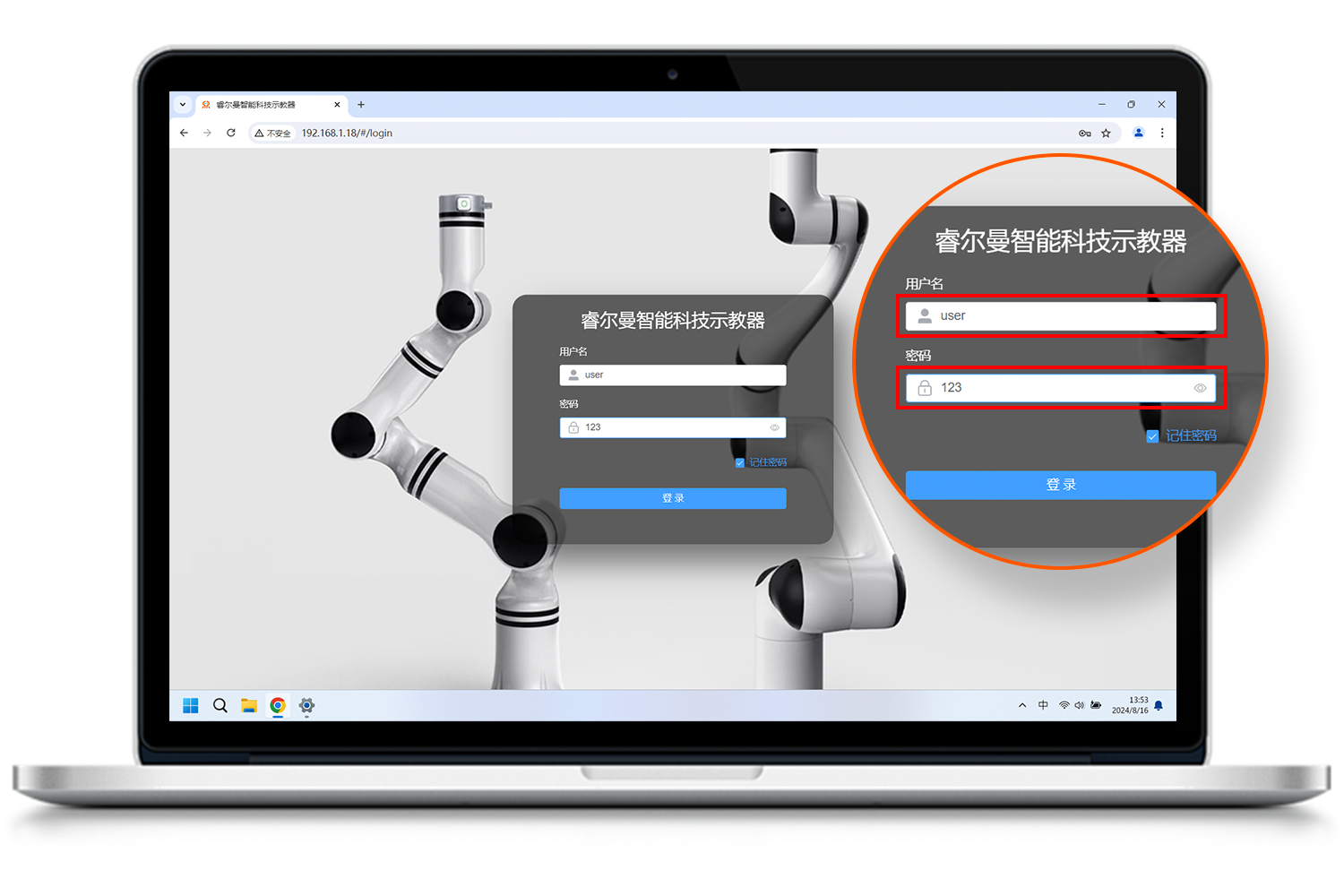
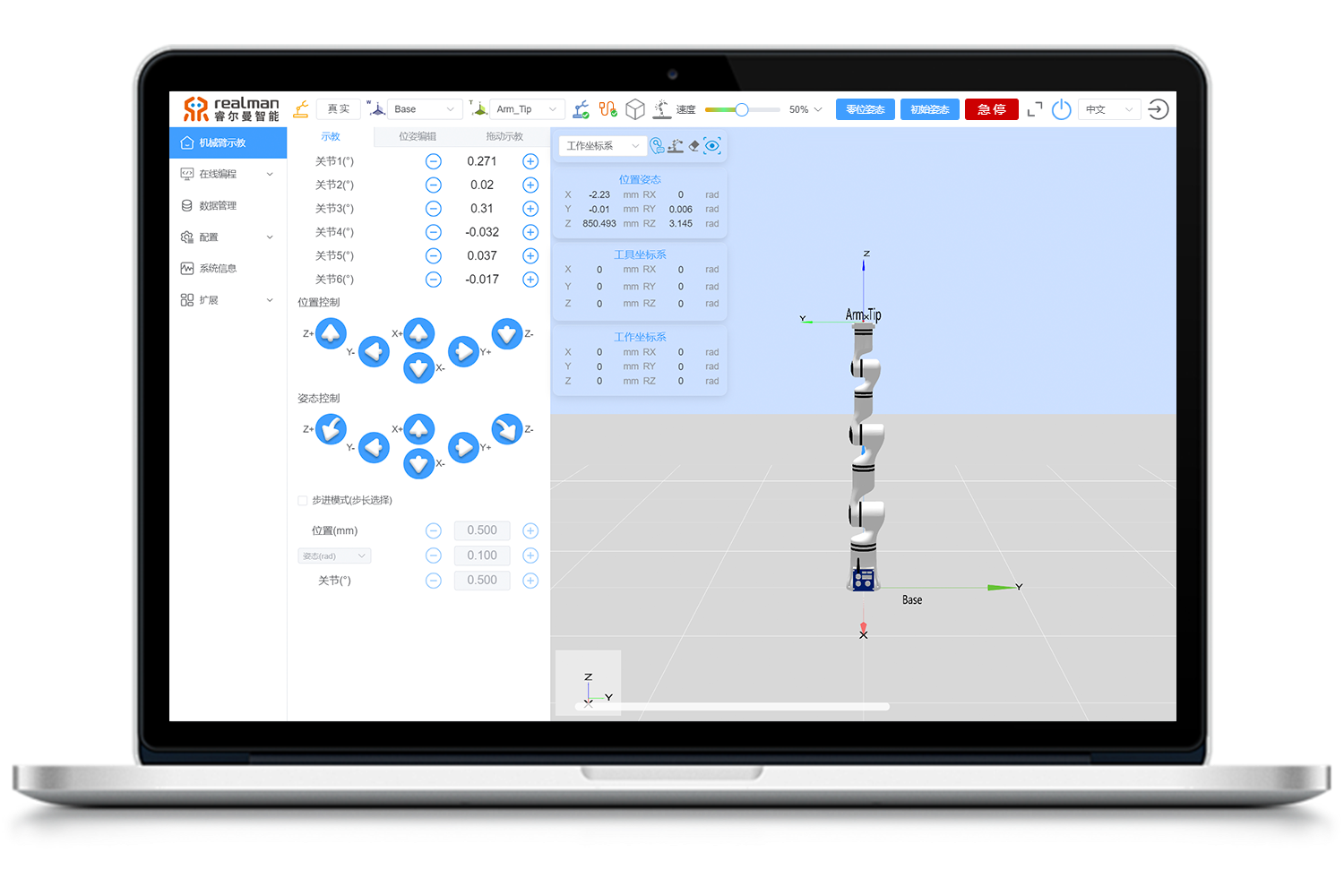
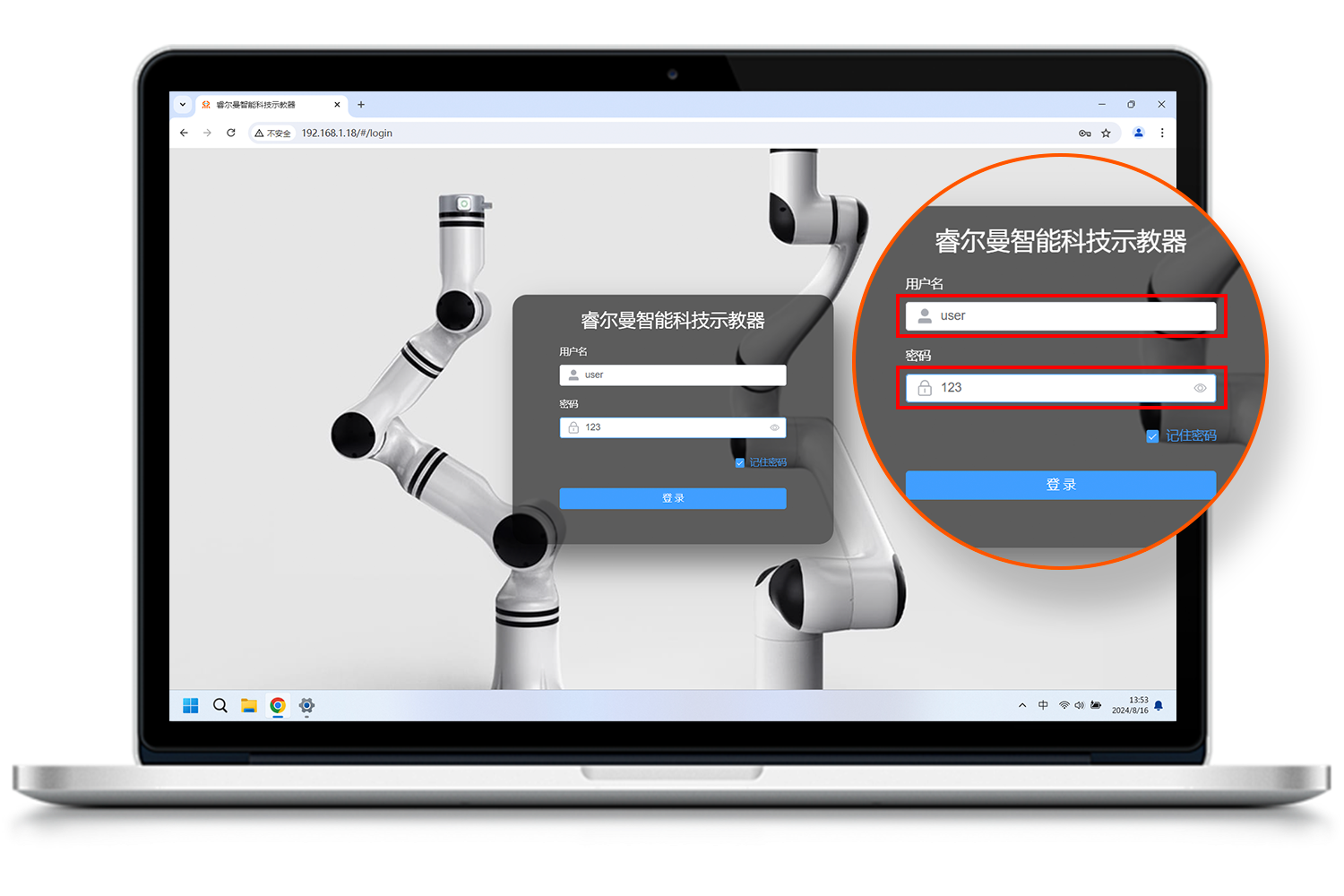
打开谷歌浏览器,输入网址192.168.1.18,进入登录页面;
-
输入账号:user,密码:123,点击登录即可进入机械臂示教界面。
2. 无线连接:灵活便捷,适合移动操作
适合需要灵活移动操作的场景,步骤如下:
- 打开用户设备(平板、电脑等)的WiFi功能,搜索机器人的WiFi热点,热点名称格式为”realman_ap_xxxxxx”(如realman_ap_488d949b);

- 输入WiFi密码:12345678,连接热点;
- 打开谷歌浏览器,输入网址192.168.33.80,进入登录页面;
- 同样输入账号user、密码123,登录后即可使用示教功能。
3. 小技巧
若首次连接或升级程序后出现页面卡顿,按Ctrl+F5强制刷新页面即可解决。
五、上手实操:简单拖动示教,快速体验轨迹复现
连接示教器后,我们可以通过机械臂末端的按钮进行简单的拖动示教,快速感受机器人的操作逻辑:
- 长按机械臂末端的绿色按钮,机械臂进入可拖动状态,此时手动拖动机械臂到需要的位置,拖动过程中会实时记录轨迹;

- 松开绿色按钮,轨迹记录完成;
- 短按蓝色按钮,机械臂会自动回到轨迹起始位置,并复现最后一次记录的轨迹;
- 长按蓝色按钮,机械臂会运动到初始位姿,松开按钮即可停止。
注:以上是基础示教操作,更复杂的程序编写、参数设置等功能,可参考《睿尔曼机械臂web示教器使用手册》,二次开发相关需求可查阅官方开放接口说明。
六、关机流程:规范操作,保护设备
使用完成后,需按以下步骤规范关机,延长设备使用寿命:
- 确保机械臂处于安全初始位姿,无负载或障碍物阻挡;
- 按下控制器上的电源开关,使其弹起,关闭机器人电源;
- 关闭DC24V直流供电电源,断开电源线缆(长期不使用时)。
具身智能:零基礎入門睿爾曼機械臂(一)——從硬件準備到首次運行全攻略
零基礎入門睿爾曼協作機械臂:從核心部件、底座與末端安裝,到24V接線、開機指示燈、有線/無線示教器與拖動示教,涵蓋RM65/RM75/RML63全系列首次上手指南。
來源:https://blog.csdn.net/2403_87969572/article/details/155683526
抓取時間(ISO本地):2026-05-18 05:17:19
前言
作為剛接觸睿爾曼協作機器人的新手,是否對著包裝箱裡的部件感到無從下手?別擔心!這篇入門博客將以官方硬件準備手冊為基礎,帶大家一步步完成機器人的組裝、接線、開機與示教器連接,無論是操作人員、技術人員還是開發者,都能快速上手RM65、RM75、RML63等全系列睿爾曼機械臂。
文章目錄
- 前言
- 一、先搞懂:睿爾曼機器人核心組成與接口
- 二、動手安裝:1人即可完成的快速組裝
- 三、接線與開機
- 四、示教器連接:全平臺適配,有線無線都能行
- 五、上手實操:簡單拖動示教,快速體驗軌跡復現
- 六、關機流程:規範操作,保護設備
一、先搞懂:睿爾曼機器人核心組成與接口
在動手操作前,我們先熟悉機器人的核心部件和接口功能,這是後續操作的基礎。
1. 核心部件
一套完整的睿爾曼協作機器人包含機械臂本體、控制器(分第二代和第三代)、DC24V供電線纜、網線,以及用於安裝的螺栓和扳手等配件。其中第三代控制器相比第二代,新增了狀態指示燈,同時簡化了網口設計,使用更便捷。
2. 關鍵接口功能詳解
控制器面板的接口是機器人與外界連接的核心,每個接口的用途都至關重要:
- 開關:控制機器人電源,開啟後會亮起藍燈,直觀判斷電源狀態;
- 電源接口:插入DC24V電源線纜,為機器人提供動力;
- 複用IO接口:可引出RS485、I/O等信號,支持連接外置急停按鈕盒等設備;
- 無線網絡:百兆Wi-Fi模塊,用於無線通訊連接;
- USB接口:擴展接口,可外接藍牙手柄接收器等外設;
- 有線網口:千兆網口,用於穩定的有線通訊;
- 交互RGB指示燈:機器人狀態的”晴雨表”,不同顏色對應不同工作狀態:
- 藍色:控制器啟動初始化中;
- 白色:各關節啟動初始化中;
- 綠色:機械臂正常運行,可開始工作;
- 黃色:普通故障警告,需立即處理;
- 紅色:嚴重故障,需緊急停機排查。
二、動手安裝:1人即可完成的快速組裝
睿爾曼機械臂屬於超輕量設計,以RM65系列為例,自重僅7.2kg,底座直徑110mm,單人就能完成安裝,其他系列安裝流程基本一致。
1. 底座安裝:固定機械臂基礎
- 從包裝箱中取出機械臂,找到底座安裝位置,確認安裝面平整牢固;
- 準備4個M6內六角螺栓和配套的M6內六角扳手;
- 對準機械臂底座的安裝孔位,用螺栓將機械臂固定在預設的安裝面上,擰緊螺栓確保穩固,避免運行時晃動。
2. 末端擴展工具安裝:適配個性化需求
機械臂末端提供標準法蘭接口,法蘭盤上在Ф49mm分度圓上均勻分佈著6個M4螺紋孔,適配大多數末端工具:
- 根據需要安裝的夾具、吸盤等末端工具的安裝尺寸,對準法蘭盤的螺紋孔;
- 用匹配的螺栓固定末端工具,確保安裝牢固,避免作業時脫落。
三、接線與開機
接線和開機是機器人啟動的關鍵環節,每一步都要嚴格遵循規範,避免設備損壞或安全隱患。
1. 接線前的準備
- 準備DC24V供電電源,電壓範圍建議20~27V(極限可到30V),推薦使用600W以上、支持打嗝模式和1S恆流輸出功能的開關電源,保證供電穩定;
- 檢查機器人的工作環境:需保持乾燥清潔,避免暴露在灰塵過多或超出IP54等級的潮溼環境中,若環境存在傳導性灰塵,需額外做好防護。
2. 接線步驟
- 取出包裝箱中的DC24V電源線纜,線纜棕色線芯為正極,藍色線芯為負極;
- 將電源線連接到控制器面板左下角的2芯航插電源接口,確保正負極連接正確;
- 若無外置設備(如急停按鈕盒、藍牙手柄),僅需額外連接網線(有線通訊)或後續通過Wi-Fi連接(無線通訊)即可。
3. 開機前的安全檢查
- 確認電源線與電源插頭、控制器接口連接牢固,無鬆動;
- 檢查控制器電源開關處於關閉狀態(未彈起);
- 清理機械臂周圍環境,確保無人員、障礙物,避免開機後碰撞;
- 再次確認電源為DC24V直流電源,符合電壓要求。
4. 開機流程與狀態判斷
- 按下控制器上的電源開關,此時開關背景燈變為藍色,說明機械臂已上電;
- 控制器右上角指示燈變為藍色,代表控制器開始啟動;
- 指示燈變為白色,機械臂各關節進入初始化階段;
- 指示燈變為綠色閃爍狀態,說明機器人啟動完成,可正常工作(整個啟動過程約50秒)。
四、示教器連接:全平臺適配,有線無線都能行
睿爾曼機械臂的示教器是web端軟件,無需安裝,瀏覽器直接登錄即可,支持安卓、Windows、蘋果、Linux等全平臺設備,推薦使用谷歌瀏覽器以保證兼容性。
1. 有線連接:穩定優先,適合精準操作
適合需要穩定通訊的場景(如程序編寫、精準示教),步驟如下:
-
將Windows電腦(或其他有線設備)通過網線與機器人控制器的千兆網口連接;
-
配置電腦IP地址:
- 右擊電腦右下角WiFi圖標,打開”網絡和Internet設置”(Win11需先點擊”高級網絡設置”,再選擇”更多網絡適配器選項”);
- 找到”以太網”,點擊其下拉頁面中”更多適配器選項”後的”編輯”;
- 在彈出的對話框中,選中”Internet協議版本4”,點擊”屬性”;
- 將IP地址配置到192.168.1.xx網段(xx為除18外的任意數字,推薦192.168.1.100),子網掩碼、網關等按常規局域網配置;
- 右擊電腦右下角WiFi圖標,打開”網絡和Internet設置”(Win11需先點擊”高級網絡設置”,再選擇”更多網絡適配器選項”);
-
打開谷歌瀏覽器,輸入網址192.168.1.18,進入登錄頁面;
-
輸入賬號:user,密碼:123,點擊登錄即可進入機械臂示教界面。
2. 無線連接:靈活便捷,適合移動操作
適合需要靈活移動操作的場景,步驟如下:
- 打開用戶設備(平板、電腦等)的WiFi功能,搜索機器人的WiFi熱點,熱點名稱格式為”realman_ap_xxxxxx”(如realman_ap_488d949b);
- 輸入WiFi密碼:12345678,連接熱點;
- 打開谷歌瀏覽器,輸入網址192.168.33.80,進入登錄頁面;
- 同樣輸入賬號user、密碼123,登錄後即可使用示教功能。
3. 小技巧
若首次連接或升級程序後出現頁面卡頓,按Ctrl+F5強制刷新頁面即可解決。
五、上手實操:簡單拖動示教,快速體驗軌跡復現
連接示教器後,我們可以通過機械臂末端的按鈕進行簡單的拖動示教,快速感受機器人的操作邏輯:
- 長按機械臂末端的綠色按鈕,機械臂進入可拖動狀態,此時手動拖動機械臂到需要的位置,拖動過程中會實時記錄軌跡;
- 鬆開綠色按鈕,軌跡記錄完成;
- 短按藍色按鈕,機械臂會自動回到軌跡起始位置,並復現最後一次記錄的軌跡;
- 長按藍色按鈕,機械臂會運動到初始位姿,鬆開按鈕即可停止。
注:以上是基礎示教操作,更復雜的程序編寫、參數設置等功能,可參考《睿爾曼機械臂web示教器使用手冊》,二次開發相關需求可查閱官方開放接口說明。
六、關機流程:規範操作,保護設備
使用完成後,需按以下步驟規範關機,延長設備使用壽命:
- 確保機械臂處於安全初始位姿,無負載或障礙物阻擋;
- 按下控制器上的電源開關,使其彈起,關閉機器人電源;
- 關閉DC24V直流供電電源,斷開電源線纜(長期不使用時)。
Embodied Intelligence: RealMan Robotic Arm for Beginners (Part 1) — Hardware to First Run
Beginner guide to RealMan collaborative arms: components, mounting, 24 V wiring, LED status, wired/wireless web teach pendant, and drag teaching for RM65/RM75/RML63.
Captured at (local ISO): 2026-05-18 05:17:19
Preface
New to RealMan collaborative robots? This guide follows the official hardware prep manual: assembly, wiring, power-on, and teach pendant connection for RM65, RM75, RML63, and related arms.
I. Core components and ports
1. Core parts
A full set includes the arm, controller (Gen 2 or Gen 3), 24 V DC cable, Ethernet cable, and mounting hardware. Gen 3 adds status LEDs and simplifies Ethernet.
2. Key interfaces
- Power switch: Blue when on
- Power port: 24 V DC
- Reusable I/O: RS485, I/O, external E-stop
- Wi‑Fi: 100 Mbps for wireless teach
- USB: Bluetooth receiver, etc.
- Ethernet: Gigabit wired link
- RGB indicator:
- Blue: controller booting
- White: joint init
- Green: ready
- Yellow: warning
- Red: fault — stop immediately
II. Assembly (one person)
RM65 weighs ~7.2 kg; one person can mount it.
1. Base mount
- Unpack; confirm a flat, rigid surface
- Four M6 bolts + hex key
- Align base holes; tighten firmly
2. End-effector
Standard flange: six M4 holes on a Ø49 mm bolt circle.
III. Wiring and power-on
1. Before wiring
- 24 V supply, 20–27 V (up to 30 V max); ≥600 W recommended with hiccup / 1 s constant-current mode
- Dry, clean area; IP54 or better if dusty
2. Wiring
- Brown = +, blue = − on the 2-pin aviation connector
- Connect Ethernet (wired) or use Wi‑Fi later
3. Pre-power checks
- Cables secure; switch off
- Clear workspace
- Confirm 24 V DC
4. Power-on sequence
- Press power — switch backlight turns blue
- Top LED blue → white (joint init) → green blink (~50 s, ready)
IV. Teach pendant (web UI)
Browser-based; Chrome recommended. Default wired IP 192.168.1.18, user user / 123.
1. Wired
- PC Ethernet to controller gigabit port
- Set PC IP to
192.168.1.xx(not .18), mask 255.255.255.0
- Open
http://192.168.1.18and log in
2. Wireless
- Connect to
realman_ap_xxxxxx, password12345678 - Open
http://192.168.33.80, same credentials
3. Tip
If the page lags after an update, press Ctrl+F5.
V. Drag teaching
- Long-press green button — drag arm; path is recorded
- Release to finish recording
- Short-press blue — replay last path
- Long-press blue — return home
See the official web teach manual and API docs for programming.
VI. Shutdown
- Safe home pose; no load blocking motion
- Press power switch (pop up)
- Turn off 24 V supply if storing long-term