場景化機器人 — 園區智慧巡檢小車與工業自主搬運機械人
兩款場景化機器人全流程落地:園區智慧巡檢小車(LSTM、YOLO、多端與 DeepSeek)與工業搬運 AMR(PID、MobileNet)。
福州大學 電氣工程與自動化學院
2024年11月——2025年12月
專案背景
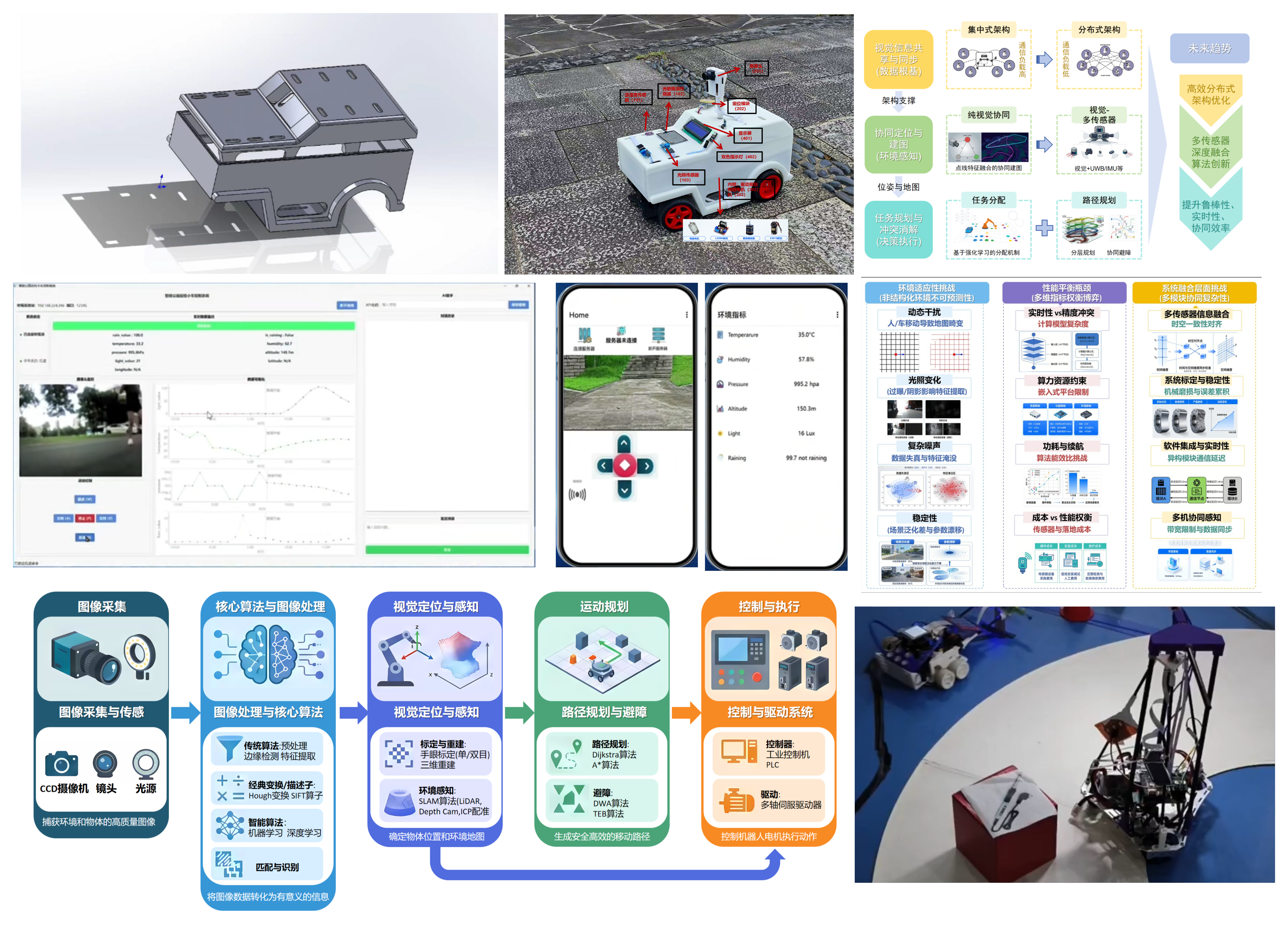
本專案面向智慧行動機器人於園區維運與工業物流兩類典型場景之落地需求,依託學院創新實踐培育機制,將「感知—決策—執行—人機協同」貫通為可交付之整機系統。園區側以開放環境、人流與氣象擾動為約束,強調多源環境資料之時序建模、視覺安全保障與多端維運體驗;工業側以節拍、定位精度與物料辨識可靠性為主線,強調運動控制與輕量視覺於嵌入式算力下之協同部署。於工程推進過程中,團隊以大學生智能車競賽等相關賽事與 iCAN 國際創新創業大賽等創新實踐平台為牽引,組織需求分析、樣機迭代與現場聯調,將演算法驗證、嵌入式實作與演示答辯納入同一套里程碑管理;於搬運方向同步展開文獻調研與綜述撰寫,系統梳理機器視覺於搬運機器人之技術脈絡與應用進展,為後續論文與專利布局提供問題導向之研究基礎,形成「競賽驅動快速迭代+學術化總結沉澱」之閉環路徑。
- 針對園區開放場景環境時變、傳統巡檢響應滯後之問題,主導開發基於雙向 LSTM 與多頭注意力之環境預測引擎,將溫濕度、光照及降雨預測誤差控制在 1.8%–4.2%、季節性誤差由 31% 降至 6.5%;建置 PyQt5 上位機與雲端通信,整合行人識別(準確率 99.3%)與 1.5 m 內 0.5 s 緊急制動。
- 針對工業物流物料辨識與循跡節拍要求嚴格之問題,面向自主搬運完成 PID 循跡控制與 MobileNet 輕量辨識嵌入式部署,參與整車軟硬體聯調、感測器標定與智慧車競賽彩排,於競賽工況下達到可展示指標。
- 針對搬運機器人感知瓶頸,主導建構「環境感知—路徑規劃—精準操作—多機協同」全棧框架並調研近百篇文獻,對比幾何匹配與深度學習方案,剖析 SLAM、SDF 與視觸覺融合於嵌入式平台之工程壁壘,支撐《機器人技術與應用》(科技核心·CSTPCD)綜述論文。
- 作為技術負責人統籌兩款機器人系統測試、部署文件與問題閉環,並以互聯網+、iCAN 等賽事為牽引組織樣機迭代與現場聯調。
專案產出
技術棧
Python, PyQt, Streamlit, MobileNet, YOLO