具身智能——机械臂全解析:从技术原理到产业生态,解锁智能执行新范式
当流水线上的机械臂精准完成第1000次焊接,当手术机器人辅助医生完成0.1毫米级的操作,当物流仓库的分拣臂每小时处理1200件包裹——这些场景都在诉说着机械臂作为"智能执行终端"的核心价值。作为集机械、电子、控制等多学科于一体的核心装备,机械臂已从简单的"替代人工"进化为"价值共创"的产业伙伴。今天,我们就全面拆解机械臂的技术内核与产业图景。- 前言 - [一、本质认知:机械臂是什么?
前言
当流水线上的机械臂精准完成第1000次焊接,当手术机器人辅助医生完成0.1毫米级的操作,当物流仓库的分拣臂每小时处理1200件包裹——这些场景都在诉说着机械臂作为”智能执行终端”的核心价值。作为集机械、电子、控制等多学科于一体的核心装备,机械臂已从简单的”替代人工”进化为”价值共创”的产业伙伴。今天,我们就全面拆解机械臂的技术内核与产业图景。
一、本质认知:机械臂是什么?
机械臂是一种能模拟人类手臂动作的自动化机械装置,通过可编程的控制程序,实现对三维(或二维)空间内目标的精准定位与操作。其核心本质是”多自由度的执行系统”,区别于传统自动化设备的固定轨迹,机械臂可通过参数调整适配多样化任务,兼具刚性执行与柔性协作的双重特性。

从历史维度看,机械臂的发展始于20世纪中期:1959年尤尼梅申公司推出的”尤尼梅特”成为首台工业机械臂,1969年斯坦福臂首次实现六轴球形手腕设计,而如今的机械臂已融合AI、视觉等技术,完成了从”机械执行”到”智能决策”的跨越。

二、结构拆解:机械臂的”身体构造”
一套完整的机械臂系统由”机械本体+驱动系统+控制系统+感知模块”四大核心部分组成,各模块协同实现精准运动:
1. 机械本体:运动的载体
作为机械臂的”骨骼”,主要包括基础基座、连杆结构与末端执行器:
- 基座:提供稳定支撑,分为固定型与旋转型,后者可扩展作业半径;
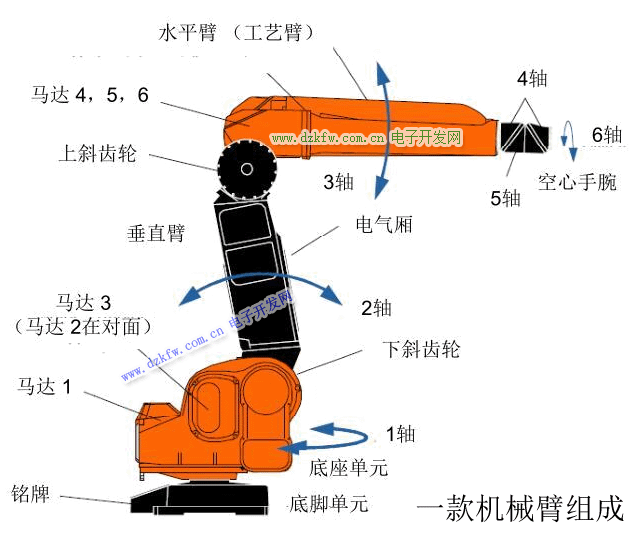
- 连杆与关节:连杆是连接关节的刚性构件,关节则决定运动自由度(DOF),常见的旋转关节(实现转动)与移动关节(实现伸缩)组合,构成了不同构型的机械臂,如六轴铰接型(最接近人类手臂)、SCARA型(平面高速运动)、笛卡尔型(直角坐标精准定位)等;
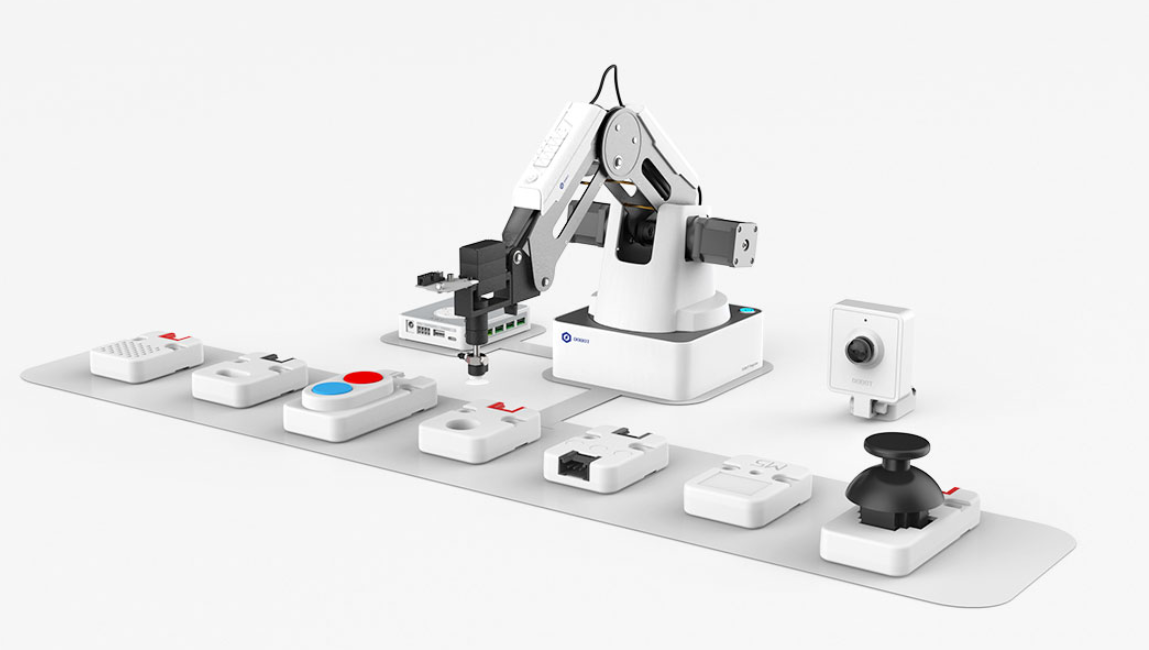
- 末端执行器:即机械臂的”手”,根据任务适配夹爪(抓取)、焊枪(焊接)、吸盘(搬运)、手术刀(医疗)等,天机智能的Delight系列可兼容20余种末端工具,适配多场景作业。
2. 驱动系统:动力的源泉
驱动系统为关节运动提供动力,主流分为三类:
- 伺服驱动:通过伺服电机+编码器实现闭环控制,精度高、响应快,占工业机械臂市场80%以上份额,汇川技术的驱控一体方案将响应频率提升至1kHz,能耗降低20%;
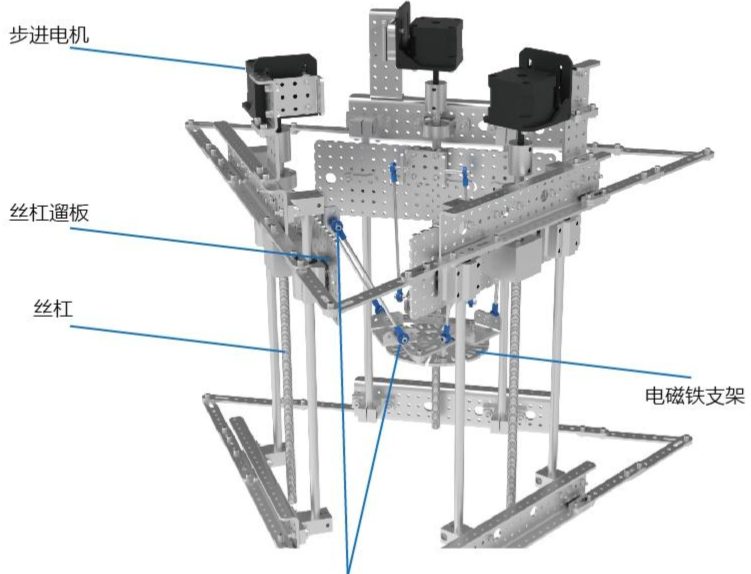
- 步进驱动:成本低,适用于低精度场景如教育机器人;
- 液压/气动驱动:输出力大,多用于重型机械臂或恶劣环境,如核电领域的特种机械臂。
3. 控制系统:决策的”大脑”
由控制器、传感器与软件组成,负责”接收指令-解析计算-驱动执行-反馈调整”的闭环流程。核心部件控制器已实现国产化突破,新松机器人、节卡等企业的自研控制器可支持复杂运动学解算与实时路径优化。
三、产业现状:国产化崛起的黄金时代
这部分就简单说明:
全球机械臂市场正处于稳健增长期,而中国已成为核心增长极,呈现”规模扩张+技术突破”的双重特征:
2024年全球工业机械臂市场规模达169亿美元,预计2025年增至180.2亿美元;中国市场表现更亮眼,2024年规模193.4亿元,2025年将突破208.9亿元,2030年全球市场份额预计达35%-40%。汽车(32%)、3C电子(25%)是核心应用领域,新能源、医疗等新兴领域增速超20%。
过去制约行业的核心零部件(控制器、伺服电机、减速器)已实现部分自主化:新松机器人实现全链条自主研发,汇川技术的伺服系统性能比肩国际品牌,天机智能的关节扭矩传感器精度达0.5N。同时,AI融合推动技术升级,大疆睿炽机械臂可识别2000种以上零件,优傲UR20通过机器学习提升30%生产效率。
四、应用全景:从工业核心到跨界渗透
机械臂的应用已从传统工业延伸至全场景,成为各行业智能化转型的关键抓手:
1. 工业制造:主战场持续深化
汽车行业是最大应用场景,机械臂承担焊接、涂装、总装等核心工序,某车企焊装线机械臂替代率达95%;3C电子领域,节卡协作臂实现手机外壳的精密打磨,重复定位精度±0.02mm;新能源行业,汇川技术机械臂用于锂电池极片切割,效率提升40%。

2. 新兴领域:爆发式增长
- 医疗健康:达芬奇手术机器人的机械臂可过滤人手抖动,实现微创手术的精准操作;康复机械臂通过力控技术辅助患者进行肢体训练;

- 物流仓储:Delta机械臂以每小时1500件的速度完成快递分拣,越疆Magician系列用于电商仓库的货物抓取;
- 特种场景:新松耐辐射机械臂用于核电设备检修,航天机械臂完成空间站舱外作业。
五、头部玩家:全球机械臂企业矩阵
国际品牌
- ABB(瑞士):工业机械臂龙头,IRB系列在汽车制造领域市占率超25%,技术覆盖从微型到重型全品类;

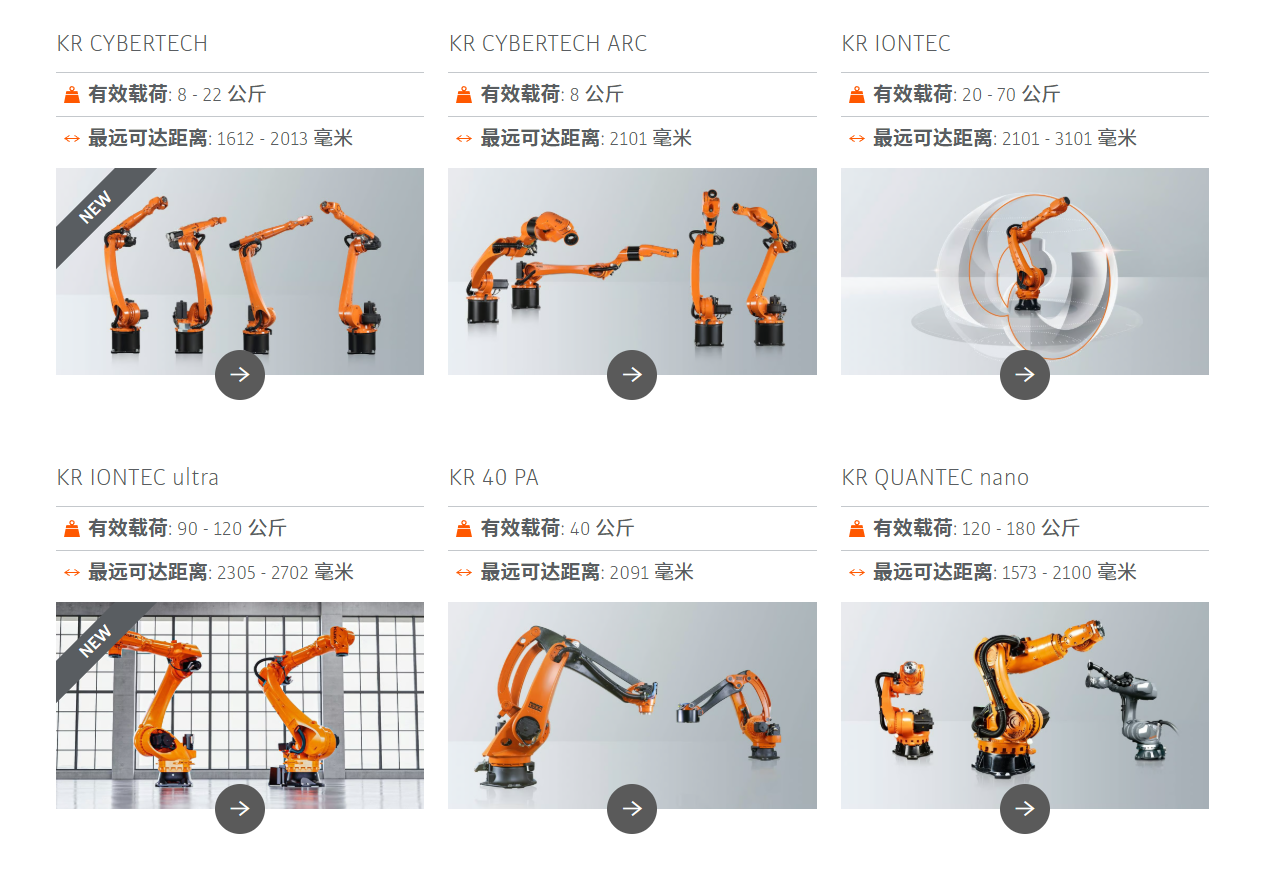
- 库卡(德国):专注重型机械臂,KR系列负载可达1000kg,广泛应用于工程机械制造;
- 发那科(日本):以高可靠性著称,LR Mate系列小型机械臂在电子行业需求旺盛。

国产品牌
- 节卡机器人:协作臂领军者,小助系列通过无线示教技术降低操作门槛,全球落地超10万台;
- 新松机器人:中科院背景,特种机械臂承担国家级项目,在航天、核电领域不可替代;

- 越疆科技:轻量化代表,Magician系列关节模组仅0.5kg,Atom人形机器人机械臂实现毫米级操作。

六、技术核心:机械臂的控制逻辑
1. 核心控制理论
机械臂控制的本质是”精准映射关节运动与末端位姿”,核心理论包括:
- 运动学:解决”如何到达目标位置”的问题,正向运动学通过关节角度计算末端位置,逆向运动学(IK)则根据目标位姿反算关节角度,是编程控制的核心难点,需解决多解性与最优解选择问题;
- 动力学:考虑重力、惯性、摩擦力等因素,通过拉格朗日方程或牛顿-欧拉法建立运动方程,为高速高精度控制提供理论支撑;
- 轨迹规划:将路径点拟合成平滑曲线,保证运动平稳性,常用样条插值、梯形速度规划等算法,避免机械冲击。
2. 常见控制方法
- PID控制:工业领域最常用方法,通过比例(P)、积分(I)、微分(D)调节消除误差,实现位置、速度的稳定控制,优傲UR20通过PID参数自整定提升适配性;
- 力控技术:通过力/扭矩传感器感知接触力,实现柔性操作,如节卡机械臂在装配任务中通过力控避免零件损坏;
- 模糊控制:适用于复杂非线性系统,无需精确数学模型,在机械臂避障中表现优异;
- 强化学习:通过与环境交互优化控制策略,越疆Atom机器人的机械臂通过强化学习掌握复杂抓取技巧。
七、定位本质:机械臂的“六个角度”与空间位置映射
在机械臂控制中,“六个角度”是实现精准定位的核心参数,尤其针对应用最广泛的六轴机械臂而言,这六个角度直接决定了机械臂末端执行器在三维空间中的具体位姿。理解这一概念,是掌握机械臂运动控制的基础。
1. “六个角度”的核心含义:六自由度的关节表征
机械臂的“六个角度”并非抽象的空间角度,而是指六轴机械臂上六个旋转关节分别的转角数值。每个关节对应一个独立的运动自由度(DOF),六个关节协同作用,使机械臂末端能够模拟人类手臂的复杂运动——既可以实现前后、左右、上下的平移,也能完成俯仰、偏航、滚转的姿态调整。
具体来看,六轴机械臂的六个关节分工明确:第一轴通常控制基座旋转,决定机械臂的作业方位;第二、三轴控制大臂和小臂的屈伸,调节末端的高度与水平距离;第四、五、六轴组成“手腕”结构,其中第四轴控制手腕旋转,第五轴负责手腕俯仰,第六轴实现末端执行器的姿态微调。这六个关节的转角数据,共同构成了机械臂的“关节空间”参数。
2. 与空间实际位置的关系:关节空间到笛卡尔空间的对应
机械臂的“六个角度”(关节空间)与末端的“空间实际位置”(笛卡尔空间)是两种不同的描述体系,但存在严格的数学对应关系。空间实际位置通常用笛卡尔坐标系中的“位姿”来完整描述,包括三个位置参数(X、Y、Z坐标,即末端在三维空间中的具体落点)和三个姿态参数(俯仰角、偏航角、滚转角,即末端执行器的朝向),这恰好与六轴机械臂的六个自由度一一匹配。
简单来说,六个关节的转角组合是“因”,末端的空间位姿是“果”。当每个关节按照指定角度转动时,通过连杆的刚性传递,末端执行器会精准到达对应的空间位置并呈现特定姿态;反之,若要让末端到达某一目标位姿,就需要通过计算反推出六个关节应有的转角数值。
3. 映射的实现:运动学的核心作用
“六个角度”与空间位置的映射过程,本质上是通过机械臂运动学完成的,分为正向运动学映射和逆向运动学映射两种核心方式,二者共同构成了机械臂定位控制的闭环。
- 正向映射:从关节角度到空间位置——通过正向运动学(FK)实现。已知六个关节的转角角度,结合机械臂各连杆的长度、关节间的几何关系等参数,利用齐次变换矩阵、DH参数法等数学工具,可精确计算出末端执行器在笛卡尔空间中的X、Y、Z坐标和姿态角度。这一过程类似“已知每个关节怎么动,算出末端会到哪”,常用于机械臂运动的仿真验证和实时位姿监测。
- 逆向映射:从空间位置到关节角度——通过逆向运动学(IK)实现。这是机械臂控制中更常用的映射方式:先确定末端执行器需要到达的目标位姿(如“在X=500mm、Y=300mm、Z=400mm处,以30°俯仰角抓取零件”),再通过逆向运动学算法反推出六个关节对应的转角数值。由于逆向运动学存在多解性(即多个关节角度组合可能对应同一末端位姿),算法还需结合运动平稳性、关节行程限制等条件,筛选出最优的关节角度组合。例如,在汽车焊接场景中,工程师只需设定焊枪的目标位置和角度,控制系统就会通过逆向运动学自动计算出六个关节的转角,驱动机械臂完成焊接作业。
简言之,“六个角度”是机械臂定位的“内部指令”,空间实际位置是“外部结果”,运动学算法则是连接二者的“翻译官”,确保机械臂的每一个动作都精准可控。
八、智能升级:核心融合模块
单一机械臂已进化为”感知-决策-执行”的智能系统,核心融合模块包括:
1. 视觉模块:机械臂的”眼睛”
通过2D/3D相机实现环境与目标识别,是应用最广泛的融合技术:3D视觉引导机械臂完成无序抓取(如物流分拣),视觉定位系统将装配精度提升至0.01mm,大疆睿炽机械臂的视觉系统可同时识别2000种零件。主流方案采用”相机+AI算法”架构,支持光照变化、遮挡等复杂场景适配。

2. 力/扭矩传感模块
安装于关节或末端,实现”力感知”能力,在精密装配、抛光等任务中不可或缺。天机智能的Marvin系列机械臂力控精度达0.5N,可完成鸡蛋抓取等柔性操作。

3. 其他融合技术
语音交互模块实现机械臂的语音控制(如”启动分拣程序”),触觉传感器提升抓取适应性,5G模块则支持远程操控与多机协同。
九、后续预告:睿尔曼机械臂第三代学习系列
了解了机械臂的宏观图景后,理论需要结合实践才能真正落地。睿尔曼作为协作机械臂领域的新锐品牌,其第三代产品在轻量化、智能控制与场景适配性上实现了显著升级。
接下来,我将开启《睿尔曼机械臂实战学习》系列博客,从硬件认知、软件编程(基于ROS系统)、基础运动控制,到视觉引导抓取、力控装配等实战案例,一步步拆解操作流程与技术细节。无论你是机器人专业学生、工程师,还是技术爱好者,都能通过系列内容掌握实际操作能力。关注我,一起从理论走向实践,解锁机械臂的更多可能!
具身智能——機械臂全解析:從技術原理到產業生態,解鎖智能執行新範式
當流水線上的機械臂精準完成第1000次焊接,當手術機器人輔助醫生完成0.1毫米級的操作,當物流倉庫的分揀臂每小時處理1200件包裹——這些場景都在訴說著機械臂作為"智能執行終端"的核心價值。作為集機械、電子、控制等多學科於一體的核心裝備,機械臂已從簡單的"替代人工"進化為"價值共創"的產業夥伴。今天,我們就全面拆解機械臂的技術內核與產業圖景。- 前言 - [一、本質認知:機械臂是什麼?
來源:https://blog.csdn.net/2403_87969572/article/details/155682807
抓取時間(ISO本地):2026-05-18 05:17:15
前言
當流水線上的機械臂精準完成第1000次焊接,當手術機器人輔助醫生完成0.1毫米級的操作,當物流倉庫的分揀臂每小時處理1200件包裹——這些場景都在訴說著機械臂作為”智能執行終端”的核心價值。作為集機械、電子、控制等多學科於一體的核心裝備,機械臂已從簡單的”替代人工”進化為”價值共創”的產業夥伴。今天,我們就全面拆解機械臂的技術內核與產業圖景。
文章目錄
- 前言
- 一、本質認知:機械臂是什麼?
- 二、結構拆解:機械臂的”身體構造”
- 三、產業現狀:國產化崛起的黃金時代
- 四、應用全景:從工業核心到跨界滲透
- 五、頭部玩家:全球機械臂企業矩陣
- 六、技術核心:機械臂的控制邏輯
- 七、定位本質:機械臂的“六個角度”與空間位置映射
- 八、智能升級:核心融合模塊
- 九、後續預告:睿爾曼機械臂第三代學習系列
一、本質認知:機械臂是什麼?
機械臂是一種能模擬人類手臂動作的自動化機械裝置,通過可編程的控制程序,實現對三維(或二維)空間內目標的精準定位與操作。其核心本質是”多自由度的執行系統”,區別於傳統自動化設備的固定軌跡,機械臂可通過參數調整適配多樣化任務,兼具剛性執行與柔性協作的雙重特性。
從歷史維度看,機械臂的發展始於20世紀中期:1959年尤尼梅申公司推出的”尤尼梅特”成為首臺工業機械臂,1969年斯坦福臂首次實現六軸球形手腕設計,而如今的機械臂已融合AI、視覺等技術,完成了從”機械執行”到”智能決策”的跨越。
二、結構拆解:機械臂的”身體構造”
一套完整的機械臂系統由”機械本體+驅動系統+控制系統+感知模塊”四大核心部分組成,各模塊協同實現精準運動:
1. 機械本體:運動的載體
作為機械臂的”骨骼”,主要包括基礎基座、連桿結構與末端執行器:
- 基座:提供穩定支撐,分為固定型與旋轉型,後者可擴展作業半徑;
- 連桿與關節:連桿是連接關節的剛性構件,關節則決定運動自由度(DOF),常見的旋轉關節(實現轉動)與移動關節(實現伸縮)組合,構成了不同構型的機械臂,如六軸鉸接型(最接近人類手臂)、SCARA型(平面高速運動)、笛卡爾型(直角座標精準定位)等;
- 末端執行器:即機械臂的”手”,根據任務適配夾爪(抓取)、焊槍(焊接)、吸盤(搬運)、手術刀(醫療)等,天機智能的Delight系列可兼容20餘種末端工具,適配多場景作業。
2. 驅動系統:動力的源泉
驅動系統為關節運動提供動力,主流分為三類:
- 伺服驅動:通過伺服電機+編碼器實現閉環控制,精度高、響應快,佔工業機械臂市場80%以上份額,匯川技術的驅控一體方案將響應頻率提升至1kHz,能耗降低20%;
- 步進驅動:成本低,適用於低精度場景如教育機器人;
- 液壓/氣動驅動:輸出力大,多用於重型機械臂或惡劣環境,如核電領域的特種機械臂。
3. 控制系統:決策的”大腦”
由控制器、傳感器與軟件組成,負責”接收指令-解析計算-驅動執行-反饋調整”的閉環流程。核心部件控制器已實現國產化突破,新松機器人、節卡等企業的自研控制器可支持複雜運動學解算與實時路徑優化。
三、產業現狀:國產化崛起的黃金時代
這部分就簡單說明:
全球機械臂市場正處於穩健增長期,而中國已成為核心增長極,呈現”規模擴張+技術突破”的雙重特徵:
2024年全球工業機械臂市場規模達169億美元,預計2025年增至180.2億美元;中國市場表現更亮眼,2024年規模193.4億元,2025年將突破208.9億元,2030年全球市場份額預計達35%-40%。汽車(32%)、3C電子(25%)是核心應用領域,新能源、醫療等新興領域增速超20%。
過去制約行業的核心零部件(控制器、伺服電機、減速器)已實現部分自主化:新松機器人實現全鏈條自主研發,匯川技術的伺服系統性能比肩國際品牌,天機智能的關節扭矩傳感器精度達0.5N。同時,AI融合推動技術升級,大疆睿熾機械臂可識別2000種以上零件,優傲UR20通過機器學習提升30%生產效率。
四、應用全景:從工業核心到跨界滲透
機械臂的應用已從傳統工業延伸至全場景,成為各行業智能化轉型的關鍵抓手:
1. 工業製造:主戰場持續深化
汽車行業是最大應用場景,機械臂承擔焊接、塗裝、總裝等核心工序,某車企焊裝線機械臂替代率達95%;3C電子領域,節卡協作臂實現手機外殼的精密打磨,重複定位精度±0.02mm;新能源行業,匯川技術機械臂用於鋰電池極片切割,效率提升40%。
2. 新興領域:爆發式增長
- 醫療健康:達芬奇手術機器人的機械臂可過濾人手抖動,實現微創手術的精準操作;康復機械臂通過力控技術輔助患者進行肢體訓練;
- 物流倉儲:Delta機械臂以每小時1500件的速度完成快遞分揀,越疆Magician系列用於電商倉庫的貨物抓取;
- 特種場景:新松耐輻射機械臂用於核電設備檢修,航天機械臂完成空間站艙外作業。
五、頭部玩家:全球機械臂企業矩陣
國際品牌
- ABB(瑞士):工業機械臂龍頭,IRB系列在汽車製造領域市佔率超25%,技術覆蓋從微型到重型全品類;
- 庫卡(德國):專注重型機械臂,KR系列負載可達1000kg,廣泛應用於工程機械製造;
- 發那科(日本):以高可靠性著稱,LR Mate系列小型機械臂在電子行業需求旺盛。
國產品牌
- 節卡機器人:協作臂領軍者,小助系列通過無線示教技術降低操作門檻,全球落地超10萬臺;
- 新松機器人:中科院背景,特種機械臂承擔國家級項目,在航天、核電領域不可替代;
- 越疆科技:輕量化代表,Magician系列關節模組僅0.5kg,Atom人形機器人機械臂實現毫米級操作。
六、技術核心:機械臂的控制邏輯
1. 核心控制理論
機械臂控制的本質是”精準映射關節運動與末端位姿”,核心理論包括:
- 運動學:解決”如何到達目標位置”的問題,正向運動學通過關節角度計算末端位置,逆向運動學(IK)則根據目標位姿反算關節角度,是編程控制的核心難點,需解決多解性與最優解選擇問題;
- 動力學:考慮重力、慣性、摩擦力等因素,通過拉格朗日方程或牛頓-歐拉法建立運動方程,為高速高精度控制提供理論支撐;
- 軌跡規劃:將路徑點擬合成平滑曲線,保證運動平穩性,常用樣條插值、梯形速度規劃等算法,避免機械衝擊。
2. 常見控制方法
- PID控制:工業領域最常用方法,通過比例(P)、積分(I)、微分(D)調節消除誤差,實現位置、速度的穩定控制,優傲UR20通過PID參數自整定提升適配性;
- 力控技術:通過力/扭矩傳感器感知接觸力,實現柔性操作,如節卡機械臂在裝配任務中通過力控避免零件損壞;
- 模糊控制:適用於複雜非線性系統,無需精確數學模型,在機械臂避障中表現優異;
- 強化學習:通過與環境交互優化控制策略,越疆Atom機器人的機械臂通過強化學習掌握複雜抓取技巧。
七、定位本質:機械臂的“六個角度”與空間位置映射
在機械臂控制中,“六個角度”是實現精準定位的核心參數,尤其針對應用最廣泛的六軸機械臂而言,這六個角度直接決定了機械臂末端執行器在三維空間中的具體位姿。理解這一概念,是掌握機械臂運動控制的基礎。
1. “六個角度”的核心含義:六自由度的關節表徵
機械臂的“六個角度”並非抽象的空間角度,而是指六軸機械臂上六個旋轉關節分別的轉角數值。每個關節對應一個獨立的運動自由度(DOF),六個關節協同作用,使機械臂末端能夠模擬人類手臂的複雜運動——既可以實現前後、左右、上下的平移,也能完成俯仰、偏航、滾轉的姿態調整。
具體來看,六軸機械臂的六個關節分工明確:第一軸通常控制基座旋轉,決定機械臂的作業方位;第二、三軸控制大臂和小臂的屈伸,調節末端的高度與水平距離;第四、五、六軸組成“手腕”結構,其中第四軸控制手腕旋轉,第五軸負責手腕俯仰,第六軸實現末端執行器的姿態微調。這六個關節的轉角數據,共同構成了機械臂的“關節空間”參數。
2. 與空間實際位置的關係:關節空間到笛卡爾空間的對應
機械臂的“六個角度”(關節空間)與末端的“空間實際位置”(笛卡爾空間)是兩種不同的描述體系,但存在嚴格的數學對應關係。空間實際位置通常用笛卡爾座標系中的“位姿”來完整描述,包括三個位置參數(X、Y、Z座標,即末端在三維空間中的具體落點)和三個姿態參數(俯仰角、偏航角、滾轉角,即末端執行器的朝向),這恰好與六軸機械臂的六個自由度一一匹配。
簡單來說,六個關節的轉角組合是“因”,末端的空間位姿是“果”。當每個關節按照指定角度轉動時,通過連桿的剛性傳遞,末端執行器會精準到達對應的空間位置並呈現特定姿態;反之,若要讓末端到達某一目標位姿,就需要通過計算反推出六個關節應有的轉角數值。
3. 映射的實現:運動學的核心作用
“六個角度”與空間位置的映射過程,本質上是通過機械臂運動學完成的,分為正向運動學映射和逆向運動學映射兩種核心方式,二者共同構成了機械臂定位控制的閉環。
- 正向映射:從關節角度到空間位置——通過正向運動學(FK)實現。已知六個關節的轉角角度,結合機械臂各連桿的長度、關節間的幾何關係等參數,利用齊次變換矩陣、DH參數法等數學工具,可精確計算出末端執行器在笛卡爾空間中的X、Y、Z座標和姿態角度。這一過程類似“已知每個關節怎麼動,算出末端會到哪”,常用於機械臂運動的仿真驗證和實時位姿監測。
- 逆向映射:從空間位置到關節角度——通過逆向運動學(IK)實現。這是機械臂控制中更常用的映射方式:先確定末端執行器需要到達的目標位姿(如“在X=500mm、Y=300mm、Z=400mm處,以30°俯仰角抓取零件”),再通過逆向運動學算法反推出六個關節對應的轉角數值。由於逆向運動學存在多解性(即多個關節角度組合可能對應同一末端位姿),算法還需結合運動平穩性、關節行程限制等條件,篩選出最優的關節角度組合。例如,在汽車焊接場景中,工程師只需設定焊槍的目標位置和角度,控制系統就會通過逆向運動學自動計算出六個關節的轉角,驅動機械臂完成焊接作業。
簡言之,“六個角度”是機械臂定位的“內部指令”,空間實際位置是“外部結果”,運動學算法則是連接二者的“翻譯官”,確保機械臂的每一個動作都精準可控。
八、智能升級:核心融合模塊
單一機械臂已進化為”感知-決策-執行”的智能系統,核心融合模塊包括:
1. 視覺模塊:機械臂的”眼睛”
通過2D/3D相機實現環境與目標識別,是應用最廣泛的融合技術:3D視覺引導機械臂完成無序抓取(如物流分揀),視覺定位系統將裝配精度提升至0.01mm,大疆睿熾機械臂的視覺系統可同時識別2000種零件。主流方案採用”相機+AI算法”架構,支持光照變化、遮擋等複雜場景適配。
2. 力/扭矩傳感模塊
安裝於關節或末端,實現”力感知”能力,在精密裝配、拋光等任務中不可或缺。天機智能的Marvin系列機械臂力控精度達0.5N,可完成雞蛋抓取等柔性操作。
3. 其他融合技術
語音交互模塊實現機械臂的語音控制(如”啟動分揀程序”),觸覺傳感器提升抓取適應性,5G模塊則支持遠程操控與多機協同。
九、後續預告:睿爾曼機械臂第三代學習系列
瞭解了機械臂的宏觀圖景後,理論需要結合實踐才能真正落地。睿爾曼作為協作機械臂領域的新銳品牌,其第三代產品在輕量化、智能控制與場景適配性上實現了顯著升級。
接下來,我將開啟《睿爾曼機械臂實戰學習》系列博客,從硬件認知、軟件編程(基於ROS系統)、基礎運動控制,到視覺引導抓取、力控裝配等實戰案例,一步步拆解操作流程與技術細節。無論你是機器人專業學生、工程師,還是技術愛好者,都能通過系列內容掌握實際操作能力。關注我,一起從理論走向實踐,解鎖機械臂的更多可能!
Embodied AI—robotic arms decoded: from principles to industry ecosystems, unlocking a new paradigm of intelligent actuation
When a line robot welds its 1,000th seam, when a surgical robot assists at 0.1 mm precision, when a sorter moves 1,200 parcels/hour—these scenes highlight arms as intelligent actuators. Blending mechanics, electronics, and control, arms evolved from human replacement to value‑co‑creation partners. This post unpacks technology and market landscape end to end. Table of contents - Preface - 1. First principles: what is a robotic arm? - 2. Anatomy: the “body” of an arm - - 2.1 Mechanics: where motion lives - 2.2 Actuation: power sources - 2.3 Control: the “brain” - 3.
Captured at (local ISO): 2026-05-18 05:17:15
Preface
When a line robot welds its 1,000th seam, when a surgical robot assists at 0.1 mm precision, when a sorter moves 1,200 parcels/hour—these scenes highlight arms as intelligent actuators. Blending mechanics, electronics, and control, arms evolved from human replacement to value‑co‑creation partners. This post unpacks technology and market landscape end to end.
1. First principles: what is a robotic arm?
A robotic arm is a programmable mechanism that mimics human arm motions to position and manipulate targets in 3D (or 2D). The essence is a multi‑DOF actuator: unlike fixed automation, arms retask via parameters, mixing rigidity with collaborative flexibility.
History: 1959 Unimate (first industrial arm), 1969 Stanford arm (six‑axis spherical wrist). Today arms embed AI and vision, moving from mechanical execution to intelligent planning.
2. Anatomy: the “body” of an arm
A full system is mechanics + actuation + control + sensing, orchestrated for precision:
2.1 Mechanics: where motion lives
The skeleton: base, links, end‑of‑arm tooling:
- Base: fixed or rotary—rotation extends reach.
- Links & joints: rigid links; joints set DOF—revolute (rotate) and prismatic (slide) combine into six‑axis articulated (human‑like), SCARA (fast planar), Cartesian (precise XYZ), etc.
- End effector: the “hand”—grippers, welders, suction cups, scalpels; Tianji Delight lines cite 20+ tools across jobs.
2.2 Actuation: power sources
Three mainstream families:
- Servo: motor + encoder closed loop—precise, fast, >80% industrial share; Inovance integrated drive/control claims 1 kHz response and −20% energy.
- Stepper: cheap for low‑precision education rigs.
- Hydraulics/pneumatics: high force—heavy industry or harsh plants (e.g., nuclear service arms).
2.3 Control: the “brain”
Controllers, sensors, and software close command → plan → actuate → feedback. Domestic controllers from Siasun, Jaka, etc., support complex kinematics and online path optimization.
3. Industry snapshot: domestic rise
Briefly: global arms grow steadily; China is a key engine—scale + tech together:
2024 global industrial robot arm market ~$16.9B, 2025 ~$18.02B; China 193.4B RMB (2024) toward 208.9B RMB (2025), targeting 35–40% global share by 2030. Auto (32%) and 3C (25%) lead; new energy and medical grow >20%.
Core parts—controllers, servos, reducers—are partially localized: Siasun end‑to‑end R&D; Inovance servos near global peers; Tianji joint torque sensors at 0.5 N class. AI lifts capability: DJI RYZE arms claimed 2,000+ part IDs; Universal Robots UR20 cites +30% productivity via learning.
4. Applications: industry core to cross‑industry spread
Arms moved beyond classic plants into digital transformation everywhere:
4.1 Manufacturing: deepening stronghold
Auto is largest—welding, paint, assembly; one OEM line cited 95% arm coverage. 3C: Jaka cobots polish phone shells at ±0.02 mm repeatability. Batteries: Inovance arms on electrode cutting, +40% throughput in the narrative.
4.2 Emerging sectors: explosive growth
- Healthcare: da Vinci filters hand tremor for minimally invasive work; rehab arms use force control for training.
- Logistics: Delta arms at ~1,500 pcs/h sorting; Magician lines for e‑commerce pick.
- Special environments: Siasun radiation‑hard arms for nuclear work; space station arms for extravehicular tasks.
5. Leaders: global vendor map
International
- ABB (CH): broad portfolio; IRB strong in auto (>25% share called out).
- KUKA (DE): heavy payload—KR up to 1,000 kg in earthmoving contexts.
- FANUC (JP): reliability; ** LR Mate** popular in electronics.
Domestic
- Jaka: cobot leader—wireless teach lowers skill barriers; 100k+ global installs cited.
- Siasun: CAS lineage—special arms for aerospace/nuclear.
- Dobot: lightweight Magician joints ~0.5 kg modules; Atom humanoid arms at mm‑scale precision.
6. Control core: how arms are governed
6.1 Theory foundations
Control is mapping joint motion ↔ end‑effector pose:
- Kinematics: forward (joints → pose), inverse (pose → joints)—IK is the programming crux (multiplicity, optimality).
- Dynamics: gravity, inertia, friction—Lagrange or Newton‑Euler equations for high‑speed precision.
- Trajectory planning: smooth paths—splines, trapezoidal velocity—to limit mechanical shock.
6.2 Common methods
- PID: ubiquitous; UR20 cites auto‑tuning for easier setup.
- Force control: tactile assembly/polish—Jaka examples avoid part damage.
- Fuzzy control: nonlinear plants without exact models—strong in obstacle avoidance.
- RL: Dobot Atom examples learn complex grasps via interaction.
7. Pose fundamentals: “six angles” and Cartesian mapping
For standard six‑axis arms, six joint angles set end‑effector position + orientation in space.
7.1 Meaning of the “six angles”: six‑axis joints
These are per‑joint rotation values—six independent DOFs combining to mimic a human arm: translate in X/Y/Z and tilt in pitch/yaw/roll.
Roles: axis‑1 swivels the base; 2–3 lift the “upper/lower arm”; 4–6 are the wrist (rotate, pitch, tool spin). Together they define joint space.
7.2 Joint space vs. Cartesian pose
Joint angles (joint space) vs. Cartesian pose (task space) are equivalent descriptions: pose = (X,Y,Z) plus (pitch, yaw, roll)—six numbers ↔ six joints.
Joint commands are the causes; Cartesian targets are the effects. A given set of angles yields one reachable pose; a desired pose may admit many joint solutions.
7.3 Making the map: kinematics
- Forward map: FK from known angles + link geometry (DH params, homogeneous transforms) to X,Y,Z and orientation—“if joints move like this, where does the tool go?”—used in sim and telemetry.
- Inverse map: IK from desired pose to joint angles—more common for programming. Multiplicity demands picking smooth, limit‑respecting solutions—e.g., welding where engineers set torch pose and controllers solve six angles automatically.
In short: six angles are internal commands; Cartesian pose is external outcome; kinematics translates between them.
8. Intelligence stack: key fusion modules
Modern arms are sense–plan–act systems:
8.1 Vision: the arm’s “eyes”
2D/3D cameras locate parts—bin picking, 0.01 mm assembly alignment cited, DJI RYZE multi‑class recognition. Typical stack: camera + CV/DL, tuned for light/occlusion.
8.2 Force/torque sensing
Sensors on joints or the flange enable force awareness for assembly/polish. Tianji Marvin cites 0.5 N‑class control for delicate picks (e.g., eggs).
8.3 Other fusion tech
Voice starts programs (“start sorting”), tactile pads improve grasp diversity, 5G enables remote ops and multi‑robot coordination.
9. Coming next: RealMan Gen‑3 learning series
Theory meets practice on the floor. RealMan (collaborative arm brand) Gen‑3 emphasizes weight, smart control, scenario fit.
Next, this blog opens a hands‑on RealMan series—hardware, ROS programming, basic motion, vision‑guided grasping, force assembly—step by step. For students, engineers, and hobbyists: follow along from Lecture to Lab and unlock more of what arms can do.