机器视觉:智能车大赛视觉组技术文档——OpenArt结合OpenMV实现色块检测
文章介绍智能车视觉中基于 OpenMV 的色块检测:说明 HSV/LAB 阈值思路、用阈值选择器取样调参的步骤,以及 find_blobs 示例代码与调试要点。
机器视觉:智能车大赛视觉组技术文档——OpenArt结合OpenMV实现色块检测
机器视觉:智能车大赛视觉组技术文档——用 YOLO3 Nano 实现目标检测并部署到 OpenART
机器视觉:智能车大赛视觉组技术文档——用eIQ工具高效训练分类模型
机器视觉:智能车大赛视觉组技术文档——第20届智能车比赛视觉组视觉模块多种思路分析
前言
在智能车比赛中是否需要用到色块检测需要根据具体情况来决定,一般来说yolo进行定位是会比色块检测更加稳定的,但是计算量较大帧率较低也是必然的,一般来说yolo在openart上面只能跑到15帧,而色块检测可以到二三十帧,所以是否应用色块检测需要根据具体的应用场景来决定。但是由于色块检测的难度是相对较低的,所以作为视觉入门教程是相当合适的。
在比赛之外,在机器视觉领域,色块检测也是一种基础且常用的技术——通过识别图像中特定颜色的区域,实现对目标物体的定位、跟踪或状态判断。无论是智能小车循迹、机械臂抓取目标,还是互动装置的触发响应,色块检测都扮演着重要角色。
本文将从原理出发,详解如何用OpenMV实现色块检测,并结合OpenArt的应用场景提供实践指南。
一、色块检测相关知识
1. 什么是色块检测?
色块检测(Color Blob Detection)是通过识别图像中颜色相近的连通区域(即“色块”),提取其位置、大小、形状等信息的技术。其核心逻辑是:先通过颜色阈值分割出目标颜色区域,再对区域进行形态学处理(如去噪、连通性分析),最终得到完整的色块特征。
2. 为什么用HSV颜色空间?
在图像中,颜色通常以RGB(红、绿、蓝)格式存储,但RGB对光照变化敏感(比如同一物体在强光和弱光下的RGB值差异很大),不利于稳定检测。因此,OpenMV的色块检测通常基于HSV或者LAB颜色空间:
- H(Hue):色相,代表颜色的种类(如红、绿、蓝),范围0-179(OpenMV中简化的取值);
- S(Saturation):饱和度,代表颜色的鲜艳程度(0为灰色,255为纯色);
- V(Value):明度,代表颜色的明亮程度(0为黑色,255为最亮)。
HSV的优势在于:H通道独立于光照强度(V通道),即使环境亮度变化,只要H值稳定,就能通过固定阈值锁定目标颜色,大幅提升检测稳定性。
3. 色块检测的核心步骤
- 图像采集:通过摄像头获取实时图像;
- 颜色空间转换:将RGB图像转为HSV图像;
- 阈值分割:根据目标颜色的HSV范围,过滤出符合条件的像素(变为白色),其他像素变为黑色(得到二值化图像);
- 色块提取:对二值化图像进行连通区域分析,提取色块的中心坐标、宽高、面积等特征;
- 结果输出:通过屏幕显示、串口通信等方式输出色块信息,用于后续控制逻辑。
二、OpenMV阈值选择器:快速确定颜色范围
要实现色块检测,首先需要确定目标颜色的HSV阈值(即H、S、V的最小值和最大值)。OpenMV IDE内置的“阈值选择器”工具可以直观地帮我们完成这一步,具体操作如下:
1. 准备工作
- 连接OpenMV摄像头到电脑,打开OpenMV IDE;
- 确保摄像头正常工作(可通过IDE左侧“连接”按钮查看实时画面)。
2. 拍摄样本图像
在IDE中运行一段简单的预览代码,让摄像头对准目标颜色物体(如红色小球),获取包含目标的图像:
import sensor, image, time
sensor.reset() # 重置摄像头
sensor.set_pixformat(sensor.RGB565) # 设置像素格式为RGB565(节省内存)
sensor.set_framesize(sensor.QVGA) # 设置分辨率为QVGA (320x240)
sensor.skip_frames(time = 2000) # 跳过2秒,等待摄像头稳定
clock = time.clock() # 初始化时钟
while(True):
clock.tick()
img = sensor.snapshot() # 拍摄一帧图像
print(clock.fps()) # 打印帧率
运行后,IDE右侧会显示实时画面,调整摄像头角度,让目标颜色清晰出现在画面中。
3. 打开阈值选择器
点击 IDE 顶部菜单栏的「Tools」→「Machine Vision」→「Threshold Editor」,打开阈值选择器窗口:
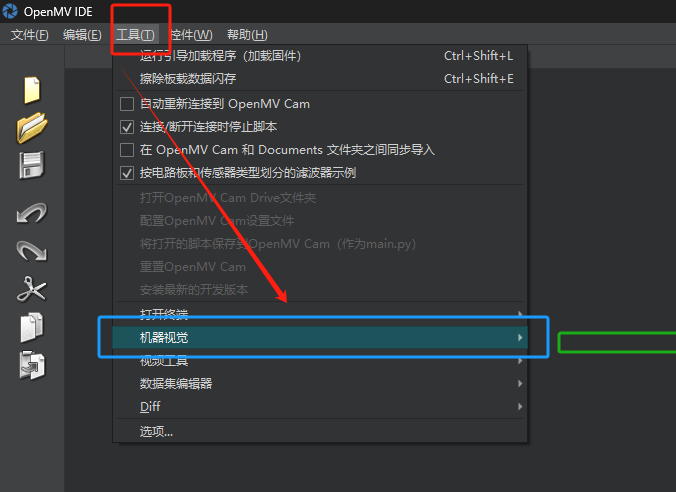
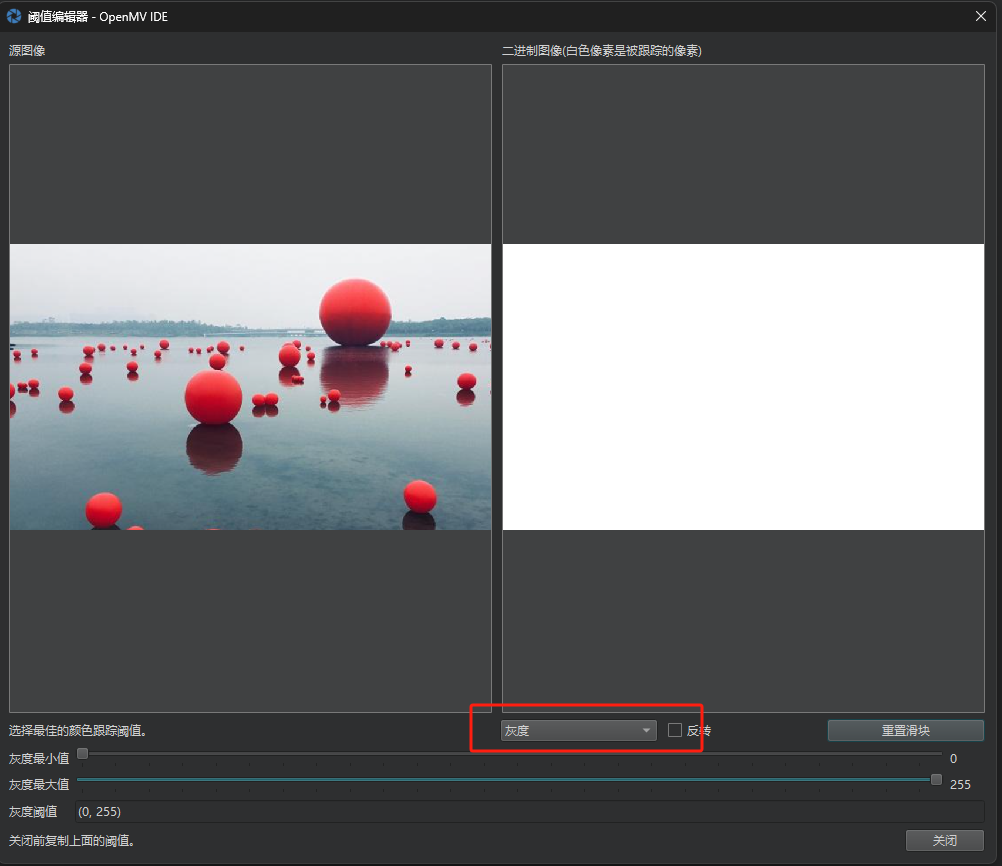
窗口左侧为原始图像,右侧为二值化预览(符合阈值的区域显示为白色);
下方滑块对应 LAB 的 6 个参数:LMin、LMax、AMin、AMax、BMin、BMax。或者是灰度的最大值或最小值
可以在图中红色框的地方进行切换
4. 调整阈值参数
- 先点击右侧预览窗口中的目标颜色区域,阈值选择器会自动填充初始HSV范围;
- 拖动滑块微调参数,直到右侧预览中只有目标颜色区域为白色,其他区域为黑色(可勾选“Inverse”反向过滤,适合背景为目标颜色的场景);
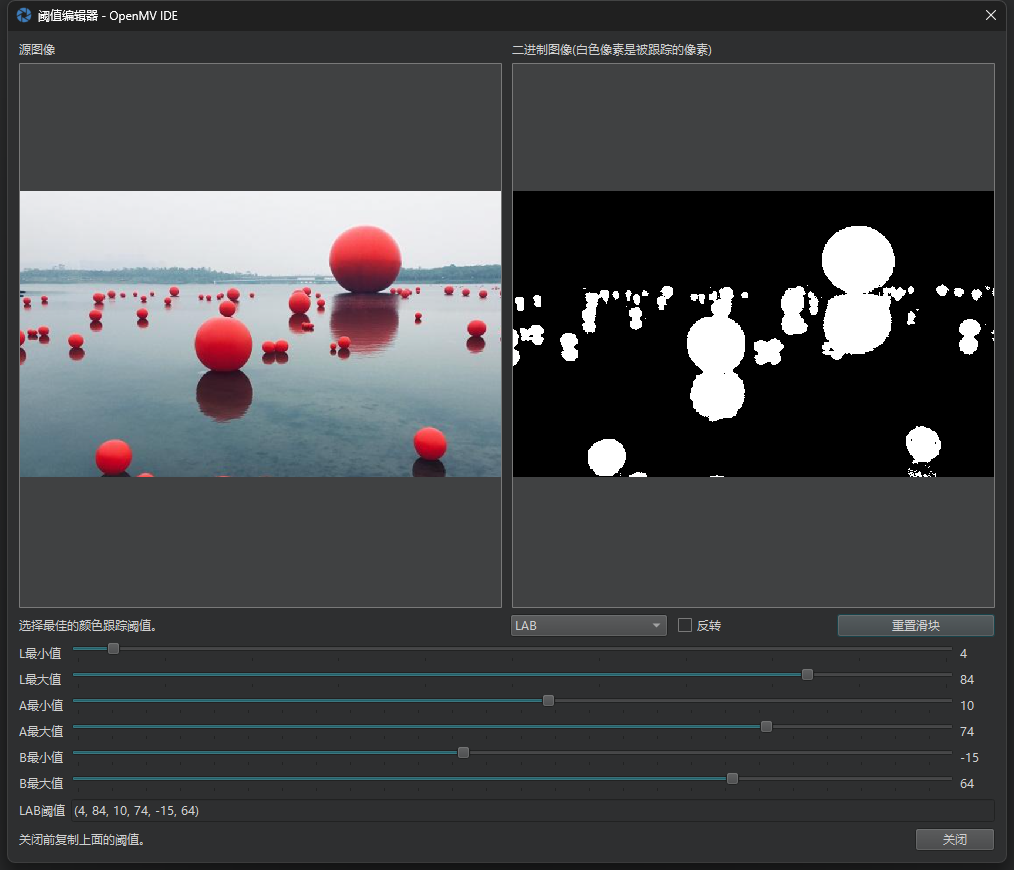
5. 保存阈值
调整完成后,点击阈值选择器底部的「Copy Threshold」,即可复制阈值参数(格式为(HMin, SMin, VMin, HMax, SMax, VMax)),用于后续代码开发。
(4, 84, 10, 74, -15, 64)
需要注意的是,色块检测非常依赖于场景的光源,切换场景的时候最好能重新进行一次阈值选择
三、OpenMV色块检测代码实现
结合上述阈值,我们可以编写完整的色块检测代码,实现实时识别并标注目标色块。以下是一个示例(以检测红色色块为例):
完整代码
import sensor, image, time
# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # 像素格式:RGB565(支持颜色识别)
sensor.set_framesize(sensor.QVGA) # 分辨率:320x240(平衡速度与精度)
sensor.skip_frames(time=2000) # 等待摄像头稳定
sensor.set_auto_gain(False) # 关闭自动增益(避免颜色值波动)
sensor.set_auto_whitebal(False) # 关闭自动白平衡(确保颜色稳定)
clock = time.clock()
# 目标颜色的HSV阈值(通过阈值选择器获取,此处以红色为例)
red_threshold = (30, 100, 100, 160, 100, 100) # 示例阈值,需根据实际调整
while True:
clock.tick()
img = sensor.snapshot() # 获取一帧图像
# 查找符合阈值的色块
# 参数说明:
# - thresholds:颜色阈值
# - x_stride/y_stride:扫描步长(越大速度越快,精度越低)
# - area_threshold:最小色块面积(过滤小噪声)
# - pixels_threshold:最小像素数(同上)
blobs = img.find_blobs([red_threshold], x_stride=5, y_stride=5,
area_threshold=100, pixels_threshold=100)
# 遍历所有找到的色块
for blob in blobs:
# 在图像上绘制色块边界框(红色,线宽2)
img.draw_rectangle(blob.rect(), color=(255, 0, 0), thickness=2)
# 在色块中心绘制十字(绿色,线宽2)
img.draw_cross(blob.cx(), blob.cy(), color=(0, 255, 0), thickness=2)
# 打印色块信息(中心坐标、宽高、面积)
print(f"中心坐标:({blob.cx()}, {blob.cy()}),宽高:{blob.w()}x{blob.h()},面积:{blob.area()}")
# 打印帧率
print(f"帧率:{clock.fps():.2f} FPS")
代码解析
- 摄像头初始化:关闭自动增益和白平衡是关键——这两个功能会自动调整图像亮度和色偏,导致HSV值不稳定,影响检测精度。
- 色块查找:
image.find_blobs()是核心函数,返回符合条件的色块列表。通过调整area_threshold和pixels_threshold,可过滤掉小面积噪声(如反光点)。 - 结果可视化:
draw_rectangle()和draw_cross()用于在图像上标注色块,方便直观观察;同时打印色块的中心坐标、大小等信息,可用于后续控制(如让小车跟踪色块中心)。
效果演示
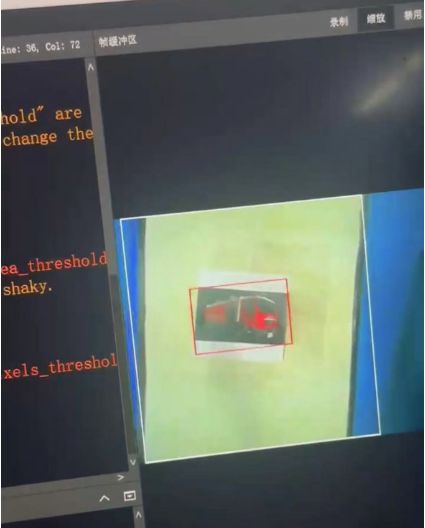
由于博主目前手上没有openart,所以找了一下之前本来想用色块检测的方案,这个方案是先去蓝色赛道的反阈值(就是并非选取蓝色赛道,而是过滤蓝色赛道),然后在非蓝色赛道的ROI里面在去非白色赛道来选取红色箱子。所以可以看到图中有两个框。
四、总结
本文从原理到实践,详解了如何用OpenMV实现色块检测:
- 基于LAB颜色空间的阈值分割是核心,能有效抵抗光照干扰;
- OpenMV阈值选择器是快速确定颜色范围的利器,大幅降低调试难度;
- 通过
find_blobs()函数可轻松提取色块特征,结合标注和数据输出,能快速对接实际应用。
希望本文能帮助你快速掌握OpenMV色块检测,在OpenArt的创意项目中实现更多有趣的交互功能!
機器視覺:智能車大賽視覺組技術文檔——OpenArt結合OpenMV實現色塊檢測
文章介紹智能車視覺中以 OpenMV 做色塊偵測:說明 HSV/LAB 閾值觀念、門檻編輯器取樣調參流程,以及 find_blobs 範例程式與除錯要點。
來源:https://blog.csdn.net/2403_87969572/article/details/153577406
抓取時間(ISO本地):2026-05-18 05:17:08
系列文章目錄
機器視覺:智能車大賽視覺組技術文檔——OpenArt結合OpenMV實現色塊檢測
機器視覺:智能車大賽視覺組技術文檔——用 YOLO3 Nano 實現目標檢測並部署到 OpenART
機器視覺:智能車大賽視覺組技術文檔——用eIQ工具高效訓練分類模型
機器視覺:智能車大賽視覺組技術文檔——第20屆智能車比賽視覺組視覺模塊多種思路分析
文章目錄
前言
在智能車比賽中是否需要用到色塊檢測需要根據具體情況來決定,一般來說yolo進行定位是會比色塊檢測更加穩定的,但是計算量較大幀率較低也是必然的,一般來說yolo在openart上面只能跑到15幀,而色塊檢測可以到二三十幀,所以是否應用色塊檢測需要根據具體的應用場景來決定。但是由於色塊檢測的難度是相對較低的,所以作為視覺入門教程是相當合適的。
在比賽之外,在機器視覺領域,色塊檢測也是一種基礎且常用的技術——通過識別圖像中特定顏色的區域,實現對目標物體的定位、跟蹤或狀態判斷。無論是智能小車循跡、機械臂抓取目標,還是互動裝置的觸發響應,色塊檢測都扮演著重要角色。
本文將從原理出發,詳解如何用OpenMV實現色塊檢測,並結合OpenArt的應用場景提供實踐指南。
一、色塊檢測相關知識
1. 什麼是色塊檢測?
色塊檢測(Color Blob Detection)是通過識別圖像中顏色相近的連通區域(即“色塊”),提取其位置、大小、形狀等信息的技術。其核心邏輯是:先通過顏色閾值分割出目標顏色區域,再對區域進行形態學處理(如去噪、連通性分析),最終得到完整的色塊特徵。
2. 為什麼用HSV顏色空間?
在圖像中,顏色通常以RGB(紅、綠、藍)格式存儲,但RGB對光照變化敏感(比如同一物體在強光和弱光下的RGB值差異很大),不利於穩定檢測。因此,OpenMV的色塊檢測通常基於HSV或者LAB顏色空間:
- H(Hue):色相,代表顏色的種類(如紅、綠、藍),範圍0-179(OpenMV中簡化的取值);
- S(Saturation):飽和度,代表顏色的鮮豔程度(0為灰色,255為純色);
- V(Value):明度,代表顏色的明亮程度(0為黑色,255為最亮)。
HSV的優勢在於:H通道獨立於光照強度(V通道),即使環境亮度變化,只要H值穩定,就能通過固定閾值鎖定目標顏色,大幅提升檢測穩定性。
3. 色塊檢測的核心步驟
- 圖像採集:通過攝像頭獲取實時圖像;
- 顏色空間轉換:將RGB圖像轉為HSV圖像;
- 閾值分割:根據目標顏色的HSV範圍,過濾出符合條件的像素(變為白色),其他像素變為黑色(得到二值化圖像);
- 色塊提取:對二值化圖像進行連通區域分析,提取色塊的中心座標、寬高、面積等特徵;
- 結果輸出:通過屏幕顯示、串口通信等方式輸出色塊信息,用於後續控制邏輯。
二、OpenMV閾值選擇器:快速確定顏色範圍
要實現色塊檢測,首先需要確定目標顏色的HSV閾值(即H、S、V的最小值和最大值)。OpenMV IDE內置的“閾值選擇器”工具可以直觀地幫我們完成這一步,具體操作如下:
1. 準備工作
- 連接OpenMV攝像頭到電腦,打開OpenMV IDE;
- 確保攝像頭正常工作(可通過IDE左側“連接”按鈕查看實時畫面)。
2. 拍攝樣本圖像
在IDE中運行一段簡單的預覽代碼,讓攝像頭對準目標顏色物體(如紅色小球),獲取包含目標的圖像:
import sensor, image, time
sensor.reset() # 重置攝像頭
sensor.set_pixformat(sensor.RGB565) # 設置像素格式為RGB565(節省內存)
sensor.set_framesize(sensor.QVGA) # 設置分辨率為QVGA (320x240)
sensor.skip_frames(time = 2000) # 跳過2秒,等待攝像頭穩定
clock = time.clock() # 初始化時鐘
while(True):
clock.tick()
img = sensor.snapshot() # 拍攝一幀圖像
print(clock.fps()) # 打印幀率
運行後,IDE右側會顯示實時畫面,調整攝像頭角度,讓目標顏色清晰出現在畫面中。
3. 打開閾值選擇器
點擊 IDE 頂部菜單欄的「Tools」→「Machine Vision」→「Threshold Editor」,打開閾值選擇器窗口:
窗口左側為原始圖像,右側為二值化預覽(符合閾值的區域顯示為白色);
下方滑塊對應 LAB 的 6 個參數:LMin、LMax、AMin、AMax、BMin、BMax。或者是灰度的最大值或最小值
可以在圖中紅色框的地方進行切換
4. 調整閾值參數
- 先點擊右側預覽窗口中的目標顏色區域,閾值選擇器會自動填充初始HSV範圍;
- 拖動滑塊微調參數,直到右側預覽中只有目標顏色區域為白色,其他區域為黑色(可勾選“Inverse”反向過濾,適合背景為目標顏色的場景);
5. 保存閾值
調整完成後,點擊閾值選擇器底部的「Copy Threshold」,即可複製閾值參數(格式為(HMin, SMin, VMin, HMax, SMax, VMax)),用於後續代碼開發。
(4, 84, 10, 74, -15, 64)
需要注意的是,色塊檢測非常依賴於場景的光源,切換場景的時候最好能重新進行一次閾值選擇
三、OpenMV色塊檢測代碼實現
結合上述閾值,我們可以編寫完整的色塊檢測代碼,實現實時識別並標註目標色塊。以下是一個示例(以檢測紅色色塊為例):
完整代碼
import sensor, image, time
# 初始化攝像頭
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # 像素格式:RGB565(支持顏色識別)
sensor.set_framesize(sensor.QVGA) # 分辨率:320x240(平衡速度與精度)
sensor.skip_frames(time=2000) # 等待攝像頭穩定
sensor.set_auto_gain(False) # 關閉自動增益(避免顏色值波動)
sensor.set_auto_whitebal(False) # 關閉自動白平衡(確保顏色穩定)
clock = time.clock()
# 目標顏色的HSV閾值(通過閾值選擇器獲取,此處以紅色為例)
red_threshold = (30, 100, 100, 160, 100, 100) # 示例閾值,需根據實際調整
while True:
clock.tick()
img = sensor.snapshot() # 獲取一幀圖像
# 查找符合閾值的色塊
# 參數說明:
# - thresholds:顏色閾值
# - x_stride/y_stride:掃描步長(越大速度越快,精度越低)
# - area_threshold:最小色塊面積(過濾小噪聲)
# - pixels_threshold:最小像素數(同上)
blobs = img.find_blobs([red_threshold], x_stride=5, y_stride=5,
area_threshold=100, pixels_threshold=100)
# 遍歷所有找到的色塊
for blob in blobs:
# 在圖像上繪製色塊邊界框(紅色,線寬2)
img.draw_rectangle(blob.rect(), color=(255, 0, 0), thickness=2)
# 在色塊中心繪製十字(綠色,線寬2)
img.draw_cross(blob.cx(), blob.cy(), color=(0, 255, 0), thickness=2)
# 打印色塊信息(中心座標、寬高、面積)
print(f"中心座標:({blob.cx()}, {blob.cy()}),寬高:{blob.w()}x{blob.h()},面積:{blob.area()}")
# 打印幀率
print(f"幀率:{clock.fps():.2f} FPS")
代碼解析
- 攝像頭初始化:關閉自動增益和白平衡是關鍵——這兩個功能會自動調整圖像亮度和色偏,導致HSV值不穩定,影響檢測精度。
- 色塊查找:
image.find_blobs()是核心函數,返回符合條件的色塊列表。通過調整area_threshold和pixels_threshold,可過濾掉小面積噪聲(如反光點)。 - 結果可視化:
draw_rectangle()和draw_cross()用於在圖像上標註色塊,方便直觀觀察;同時打印色塊的中心座標、大小等信息,可用於後續控制(如讓小車跟蹤色塊中心)。
效果演示
由於博主目前手上沒有openart,所以找了一下之前本來想用色塊檢測的方案,這個方案是先去藍色賽道的反閾值(就是並非選取藍色賽道,而是過濾藍色賽道),然後在非藍色賽道的ROI裡面在去非白色賽道來選取紅色箱子。所以可以看到圖中有兩個框。
四、總結
本文從原理到實踐,詳解了如何用OpenMV實現色塊檢測:
- 基於LAB顏色空間的閾值分割是核心,能有效抵抗光照干擾;
- OpenMV閾值選擇器是快速確定顏色範圍的利器,大幅降低調試難度;
- 通過
find_blobs()函數可輕鬆提取色塊特徵,結合標註和數據輸出,能快速對接實際應用。
希望本文能幫助你快速掌握OpenMV色塊檢測,在OpenArt的創意項目中實現更多有趣的交互功能!
Computer Vision: Smart Car Contest Vision Track Tech Notes — Color Blob Detection with OpenArt + OpenMV
The article covers blob detection with OpenMV for smart‑car vision: rationale for LAB/HSV thresholds, Threshold Editor workflow, and a runnable find_blobs example with tuning tips.
Captured at (local ISO): 2026-05-18 05:17:08
Series Index
Computer Vision: Smart Car Contest Vision Track Tech Notes — Color Blob Detection with OpenArt + OpenMV
Computer Vision: Smart Car Contest Vision Track Tech Notes — YOLO3 Nano Object Detection Deployed on OpenART
Computer Vision: Smart Car Contest Vision Track Tech Notes — Efficient Classification Training with eIQ
Computer Vision: Smart Car Contest Vision Track Tech Notes — Vision Module Ideas Analysis for the 20th Contest
Introduction
Whether blob detection belongs in your smart‑car vision stack depends on the course and constraints. Generally YOLO localizes more robustly, but costs more compute and FPS; authors often cite ~15 FPS YOLO on OpenART vs ~20–30 FPS blob pipelines, so weigh accuracy vs throughput. Blob detection stays a friendly on‑ramp to vision fundamentals.
Beyond the contest, detecting constant‑color blobs is ubiquitous—line following, robotic grasp cues, reactive installations.
This tutorial builds intuition, then walks through OpenMV Threshold Editor workflows and runnable code usable on OpenART‑class hardware.
I. Color blob detection basics
1. What is color blob detection?
Color blob detection partitions the image into spatially contiguous regions whose pixels sit inside a tuned color tube, extracting centroid, bbox, footprint, rough shape, etc. In practice:
- Threshold segmentation (brightness + chroma gates).
- Morphology / connectivity filtering to kill speckle.
- Emit blob features for control.
2. Why HSV/LAB color space?
Raw RGB reacts strongly to lighting; the same matte red shifts channels under glare vs shade. OpenMV tooling therefore leans on HSV-like sliders or six‑axis LAB gates.
When using HSV (OpenMV simplifies ranges):
- H (hue) — “which pigment,” often 0–179 in OpenMV;
- S (saturation) — gray → vivid;
- V (value) — dark → bright.
HSV cleanly separates hue from illumination (V) so thresholds survive modest lighting swings.
(OpenMV Threshold Editor exposes LAB (L,A,B min/max) in many builds; LAB is likewise robust.)
3. Core pipeline
- Acquire camera frames.
- Convert RGB → working color space.
- Threshold → binary mask.
find_blobs/ connected components → features.- StreamUART / draw overlays / steer your controller.
II. OpenMV Threshold Editor — lock in a stable color range
You need plausible (min,max) tuples per axis. OpenMV IDE ships a Threshold Editor for interactive tuning:
1. Setup
- Plug the OpenMV cam into USB, launch OpenMV IDE, connect.
- Confirm live preview renders.
2. Capture reference frames
Run a minimalist grab loop aiming the lens at your marker (say, a red ball):
import sensor, image, time
sensor.reset() # reset camera
sensor.set_pixformat(sensor.RGB565) # RGB565 saves RAM
sensor.set_framesize(sensor.QVGA) # 320x240
sensor.skip_frames(time = 2000) # warmup
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
print(clock.fps())
Frame the ROI so representative lighting hits the colored target.
3. Open the Threshold Editor
Menu Tools → Machine Vision → Threshold Editor.
Left pane: source; right: binary preview (in‑threshold pixels highlighted). Bottom sliders expose six LAB channels (L/A/B mins & maxes) — or grayscale min/max depending on toggle. Flip modes at the boxed UI switch highlighted in screenshots.
4. Adjust thresholds
- Click the colored target pixels; the IDE seeds ranges.
- Drag sliders until only desired material lights up white while background stays black — toggle Inverse if you need inverted logic.
5. Copy/save thresholds
Hit Copy Threshold once satisfied; clipboard holds a tuple (LMin, … BMax) (or analogous HSV six‑tuple):
(4, 84, 10, 74, -15, 64)
Lighting dominates performance — re‑tune when venue lighting or materials change materially.
III. OpenMV blob detection implementation
Combining Threshold Editor outputs with MicroPython yields something like:
Full sample
import sensor, image, time
# Sensor init
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time=2000)
sensor.set_auto_gain(False) # lock exposure/gain helpers
sensor.set_auto_whitebal(False) # lock AWB drift
clock = time.clock()
# Example threshold copied from Threshold Editor (replace!)
red_threshold = (30, 100, 100, 160, 100, 100)
while True:
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold], x_stride=5, y_stride=5,
area_threshold=100, pixels_threshold=100)
for blob in blobs:
img.draw_rectangle(blob.rect(), color=(255, 0, 0), thickness=2)
img.draw_cross(blob.cx(), blob.cy(), color=(0, 255, 0), thickness=2)
print(f"Center: ({blob.cx()}, {blob.cy()}); size {blob.w()}x{blob.h()}; area {blob.area()}")
print(f"FPS {clock.fps():.2f}")
Walkthrough
- Sensor tuning — disable auto gain/WB stops color drift blowing thresholds.
find_blobsreturnsblobstructs; tightenarea_threshold/pixels_thresholdagainst glitter noise.- Visualization aids debug; centroid prints feed steering logic downstream.
Effect demo
Because the author lacked OpenART hardware at writing time, the screenshot reflects an earlier strategy: inverted blue‑track masking, carve a non‑blue ROI, then isolate non‑white road and red crates—two nested boxes illustrate that pipeline.
IV. Summary
- LAB/HSV thresholds give practical lighting immunity for contest scenes.
- Threshold Editor slashes trial‑and‑error time.
find_blobs+ overlays + telemetry gets you iterating quickly toward OpenArt integration.
Hopefully this accelerates blob workflows for your upcoming smart‑car visuals!