MSPM0开发学习笔记:二维云台结合openmv实现小球追踪
OpenMV 红色小球 UART 传偏差,MSPM0 PID 驱动 D36A 双路步进二维云台追踪,含阈值编辑与阻塞控制说明。
前言
这篇博客的代码是博主在备赛电赛的时候写来练手的,结果今年电赛的题目真的差不多,是一个自动瞄准追踪装置,因此在比赛结束之后也是用这些代码写一下这篇博客。方案是两个42步进电机采用同一个驱动模块进行驱动(D36A),主控肯定采用MSPM0G3507。然后3D打印了一个二维云台的结构并进行组装,视觉方面采用openart (后面比赛的时候还是选了树莓派。openart的帧率实在太低了,最多才10-20帧)。本章博客主要是讲这个结合openart和云台进行小球追踪的思路以及代码。
其实按赛题的要求,云台的控制端是可以不使用mspm0系列的芯片进行控制的,完全可以采用openart或者其他模块直接进行控制,但是由于之前写的代码都是mspm0的,所以博主这边还是采用了mspm0的芯片进行控制(由于还有小车的循迹方面,一块mspm0的引脚甚至不够用,最后用了两块mspm0,一块控制小车一块控制云台)
如果无法很好的复现博客里的代码,可以私信作者博取源代码
一、硬件选择
主控:MSPM0G3507
驱动:D36A双路步进电机驱动
电机:42步进电机*2
视觉:Openart
二、原理介绍(UART)
这边主要讲UART的通信原理,UART 是短距离设备间常用的异步串行通信协议,无需同步时钟,仅通过 TX(发送)和 RX(接收)两根信号线实现双向通信,本装置中 Openart 与 MSPM0G3507 即通过它传输小球位置信息。
其系统含发送器与接收器:发送器将并行数据转为串行数据经 TX 发送,接收器通过 RX 接收串行数据并还原为并行数据。
数据以帧传输,含起始位(1 位低电平,表传输开始)、数据位(5-9 位,常为 8 位有效信息)、校验位(可选,用于校验准确性)、停止位(1-2 位高电平,表传输结束)。
波特率(单位 bps)是关键参数,表每秒传输的二进制位数,通信双方需一致(如本装置约定 115200bps),否则会出错。
实际应用中,Openart 识别小球后,按约定帧格式经 TX 发送位置信息;MSPM0G3507 通过 RX 接收并解析,计算云台转动角度,控制步进电机完成追踪。
三、硬件连线
云台部分硬件连线部分在前几篇篇博客里面已经说过了,可以直接去上一篇里面看,这边附上链接
MSPM0开发学习笔记:D36A驱动的42步进电机二维云台(2025电赛 附源代码及引脚配置)
这边讲一下openart和mspm0之间的连线,两个设备之间采用uart进行通讯,openart上面是有专门用于通信的一个4p接口的。
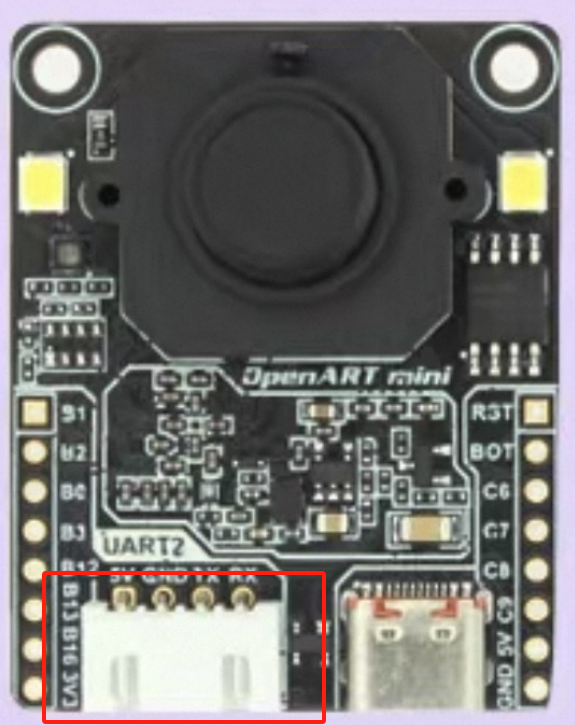
从左到右分别是5V GND TX RX;我们采用的方案是openart只负责传递偏差距离,在mspm0中进行pid计算以及云台的控制(这个是为了之后如果openart不适用的话换视觉模块更加方便,事实证明确实应该这样处理,同样的条件下openart只能跑到15帧左右,但是树莓派连接摄像头可以跑到100帧,并且通讯的延迟也更低)
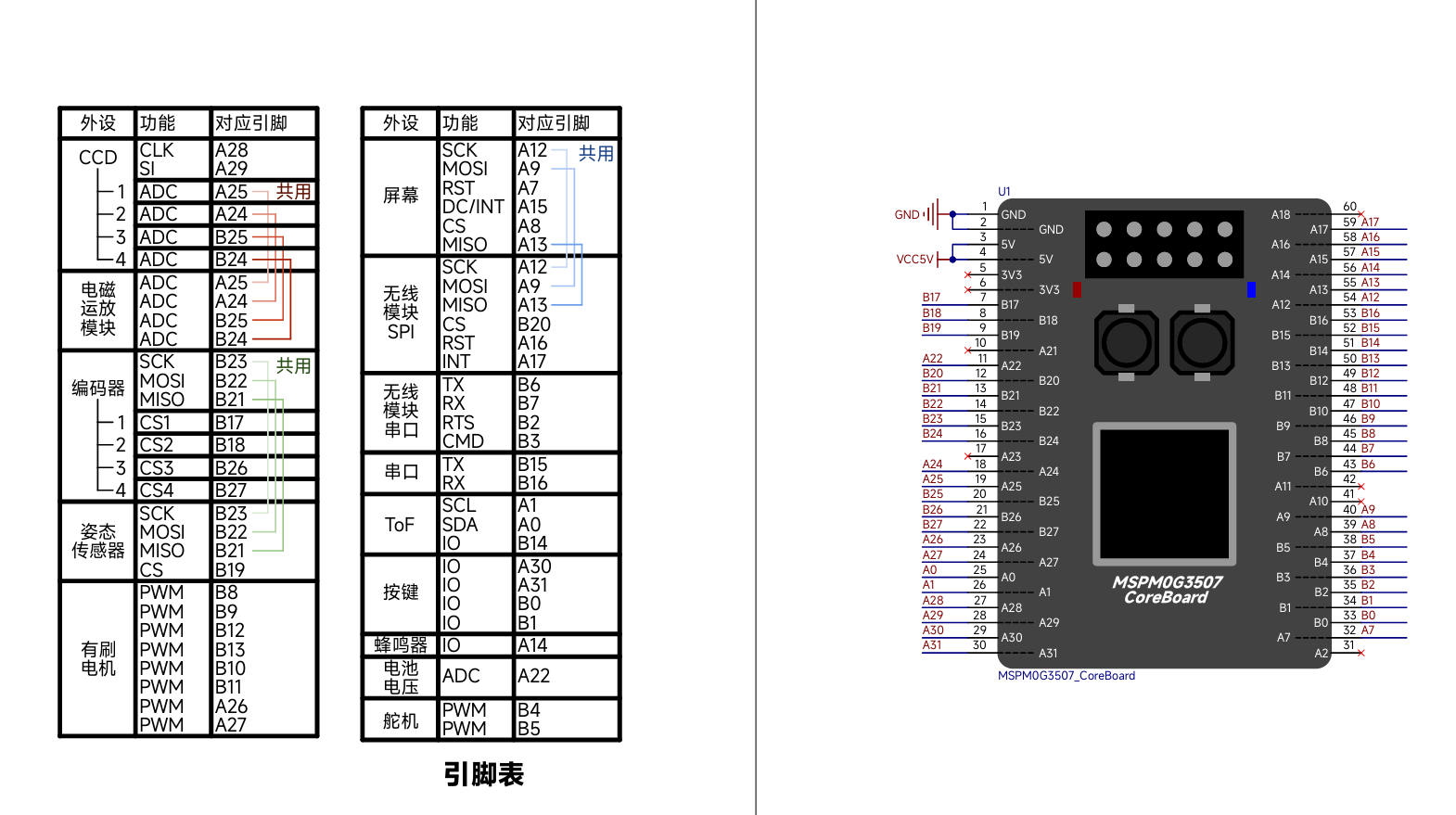
用4p的线接出来之后直接连到mspm0上面的对应引脚(注意TX要接RX,RX接TX)就好了(需要选用使用与UART通信的GPIO引脚,引脚之后在代码中初始化为GPIO引脚的RX和TX)
然后连在mspm0上的线有一点要注意就是,在引脚充足的情况下,尽量避免共用的引脚(下图左边有连线的这些),因为说不准会出什么问题导致后续排查很久。
三、软件代码
1、视觉部分代码(Openart)
视觉部分采用Python语言实现,IDE采用Openmv
具体代码如下
import sensor
import image
import time
from machine import UART
# 初始化UART,波特率115200,对应设备端口可根据实际调整
uart = UART(2, 115200)
# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA) # 320x240分辨率
sensor.skip_frames(time=2000)
sensor.set_auto_gain(False) # 关闭自动增益,避免颜色识别受光强影响
sensor.set_auto_whitebal(False) # 关闭自动白平衡
# 红色HSV阈值范围(可根据实际环境调整)
red_threshold = (30, 100, 15, 127, 15, 127)
# 图像中心点坐标
center_x = 160
center_y = 120
while True:
img = sensor.snapshot()
# 查找红色色块
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200)
if blobs:
# 取最大的色块作为目标
largest_blob = max(blobs, key=lambda b: b.area())
# 计算色块中心坐标
blob_x = largest_blob.cx()
blob_y = largest_blob.cy()
# 计算与中心点的偏差
dx = blob_x - center_x
dy = blob_y - center_y
# 按要求处理偏差值(加500,确保传输为正数)
send_dx = dx + 500
send_dy = dy + 500
# 格式化发送字符串
data_str = "X{}{}Y".format(send_dx, send_dy)
# 通过UART发送数据
uart.write(data_str + "\r\n")
print("发送数据:", data_str) # 调试用
time.sleep(0.05) # 控制发送频率
代码解释:
red_threshold = (30, 100, 15, 127, 15, 127)这边是颜色阈值,需要根据实际情况进行调整,稳定性不高说实话,因此也可以考虑yolo算法的识别,之后有机会的话也出一期,难度是相对来说比较低的,就是过程会比较麻烦一些。
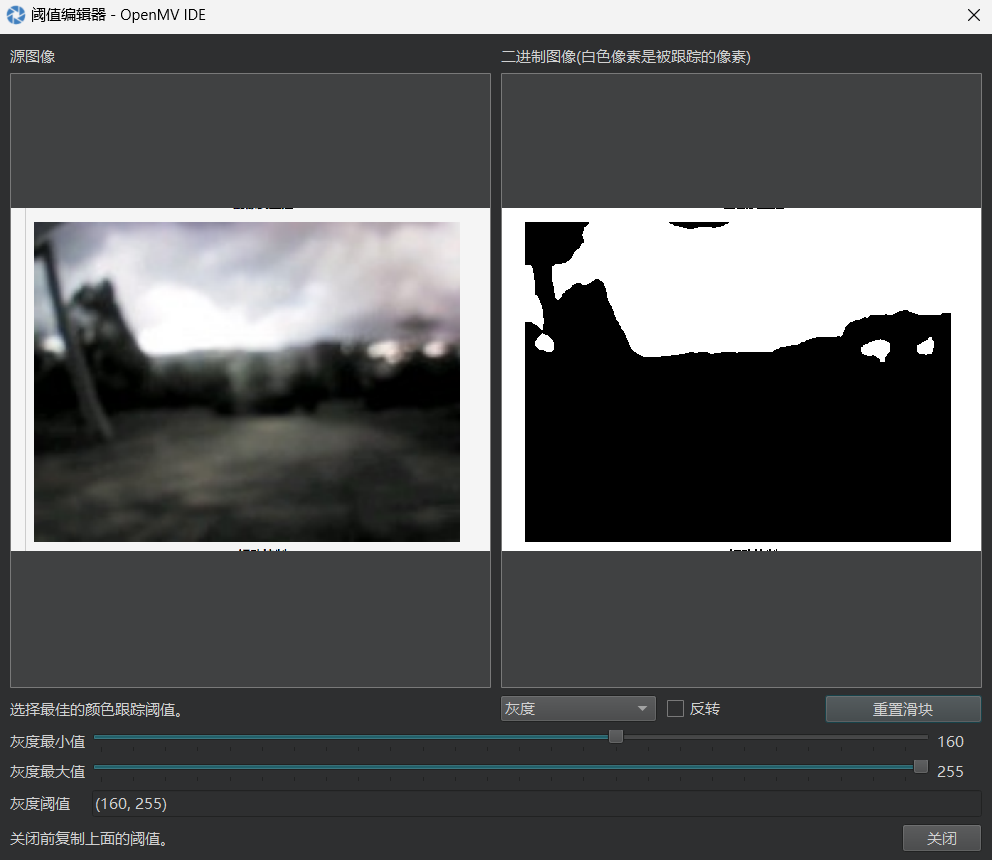
颜色阈值可以通过openmv IDE自带的阈值编辑器来得到
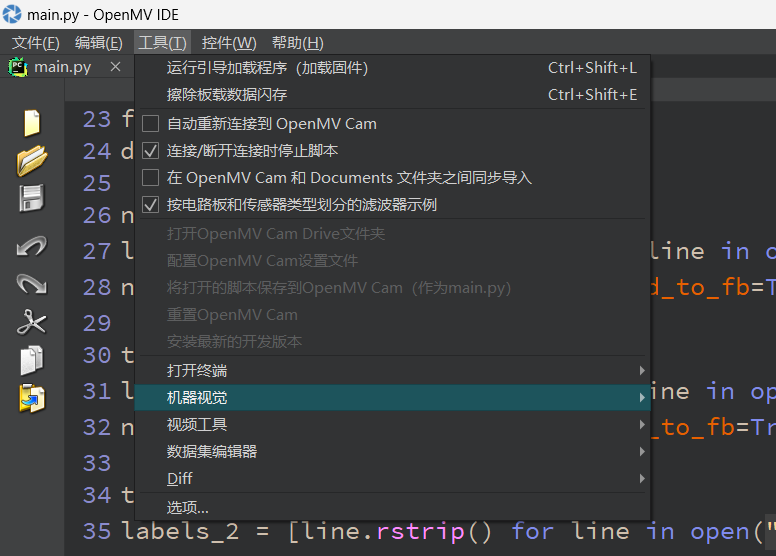
在工具这边选机器视觉,然后里面有一个阈值编辑器,打开界面如下
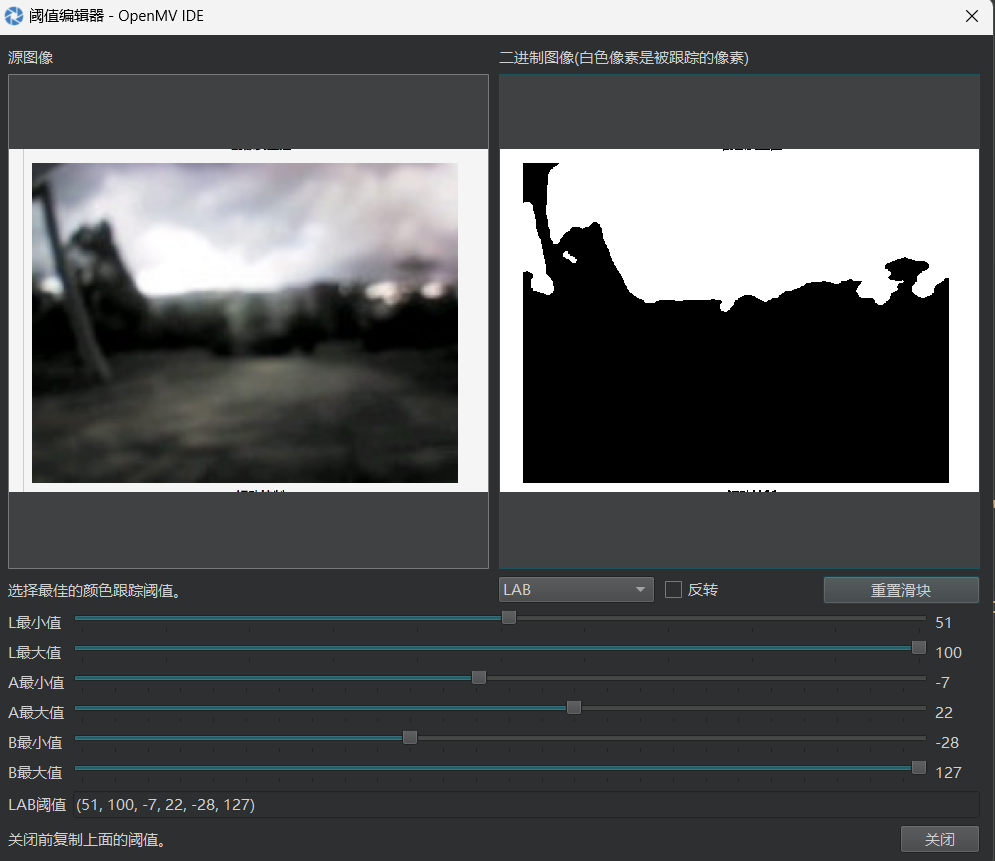
白色的是被跟踪的像素,通过调整滑块让需要的颜色变成白色就可以。
也可以选用灰度编辑器(上图用的是LAB)但是灰度编辑器一般来说用于筛选黑白会更合适(比如这次电赛E题的白色靶子和黑色边框)
选完之后吧阈值复制一下黏贴到代码的对应位置就可以了
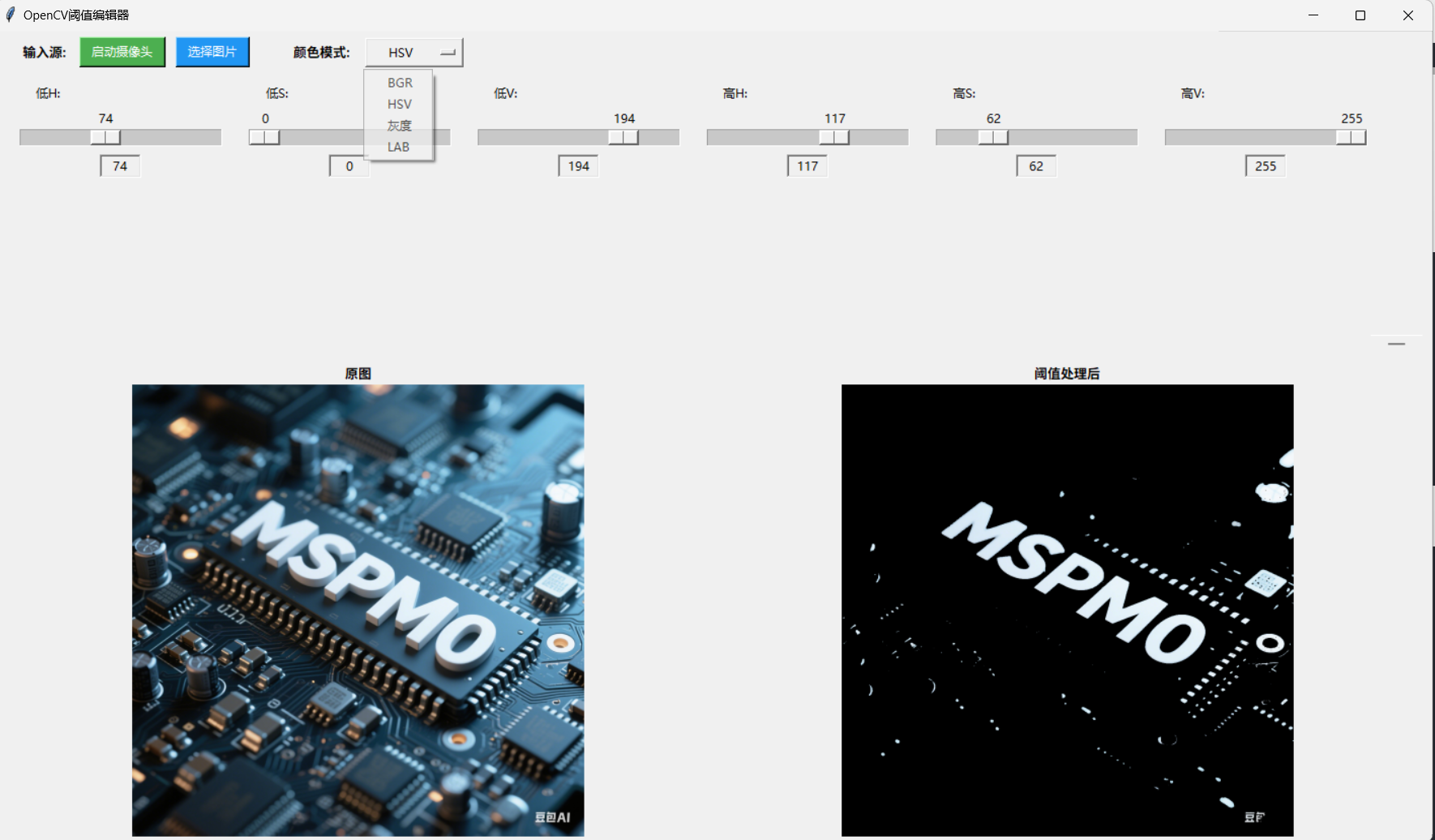
不过openmvIDE只提供LAB和灰度这两种阈值编辑器,如果有需要别的比如HSV或者BRG这些的是可以自己用opencv写一个程序来进行筛选的。
这边也是写了一个简单的阈值编辑器,完整代码如下:
import cv2
import numpy as np
import tkinter as tk
from tkinter import filedialog
from PIL import Image, ImageTk
class ThresholdEditor:
def __init__(self, root):
self.root = root
self.root.title("OpenCV阈值编辑器")
self.root.geometry("1200x800")
self.root.minsize(1000, 700)
# 初始化变量
self.image = None
self.video_capture = None
self.is_camera_active = False
self.color_mode = "BGR" # 默认模式
# 创建UI组件
self.create_widgets()
# 初始化滑块值
self.init_slider_values()
def create_widgets(self):
# 创建顶部控制区
control_frame = tk.Frame(self.root, padx=10, pady=5)
control_frame.pack(fill=tk.X)
# 输入源选择
input_frame = tk.Frame(control_frame)
input_frame.pack(side=tk.LEFT, padx=10)
tk.Label(input_frame, text="输入源:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.camera_btn = tk.Button(input_frame, text="启动摄像头", command=self.toggle_camera,
bg="#4CAF50", fg="white", padx=8)
self.camera_btn.pack(side=tk.LEFT, padx=5)
self.image_btn = tk.Button(input_frame, text="选择图片", command=self.load_image,
bg="#2196F3", fg="white", padx=8)
self.image_btn.pack(side=tk.LEFT, padx=5)
# 颜色模式选择
mode_frame = tk.Frame(control_frame)
mode_frame.pack(side=tk.LEFT, padx=20)
tk.Label(mode_frame, text="颜色模式:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.mode_var = tk.StringVar(value="BGR")
modes = ["BGR", "HSV", "灰度", "LAB"]
mode_menu = tk.OptionMenu(mode_frame, self.mode_var, *modes, command=self.change_mode)
mode_menu.config(width=8)
mode_menu.pack(side=tk.LEFT, padx=5)
# 创建滑块区域(带滚动条)
slider_container = tk.Frame(self.root)
slider_container.pack(fill=tk.X, padx=10, pady=5)
self.slider_canvas = tk.Canvas(slider_container)
scrollbar = tk.Scrollbar(slider_container, orient="horizontal", command=self.slider_canvas.xview)
self.slider_frame = tk.Frame(self.slider_canvas)
self.slider_frame.bind(
"<Configure>",
lambda e: self.slider_canvas.configure(
scrollregion=self.slider_canvas.bbox("all")
)
)
self.slider_canvas.create_window((0, 0), window=self.slider_frame, anchor="nw")
self.slider_canvas.configure(xscrollcommand=scrollbar.set)
self.slider_canvas.pack(side="left", fill="x", expand=True)
scrollbar.pack(side="bottom", fill="x")
# 创建图像显示区域
display_frame = tk.Frame(self.root)
display_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=5)
self.original_frame = tk.Frame(display_frame)
self.original_frame.pack(side=tk.LEFT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.original_frame, text="原图", font=("Arial", 10, "bold")).pack()
self.original_label = tk.Label(self.original_frame, bg="#f0f0f0")
self.original_label.pack(fill=tk.BOTH, expand=True)
self.processed_frame = tk.Frame(display_frame)
self.processed_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.processed_frame, text="阈值处理后", font=("Arial", 10, "bold")).pack()
self.processed_label = tk.Label(self.processed_frame, bg="#f0f0f0")
self.processed_label.pack(fill=tk.BOTH, expand=True)
def init_slider_values(self):
# 清除现有滑块
for widget in self.slider_frame.winfo_children():
widget.destroy()
# 根据颜色模式创建滑块
if self.color_mode in ["BGR", "HSV", "LAB"]:
# 三个通道的低阈值
self.low_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
var = tk.IntVar(value=0)
self.low_vars[channel] = var
tk.Label(frame, text=f"低{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=self.get_max_value(channel),
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 三个通道的高阈值
self.high_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
max_val = self.get_max_value(channel)
var = tk.IntVar(value=max_val)
self.high_vars[channel] = var
tk.Label(frame, text=f"高{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=max_val,
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
elif self.color_mode == "灰度":
# 灰度模式只有一个通道
self.gray_low_var = tk.IntVar(value=0)
self.gray_high_var = tk.IntVar(value=255)
# 低阈值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="低阈值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_low_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_low_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 高阈值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="高阈值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_high_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_high_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
def get_channels(self):
if self.color_mode == "BGR":
return ["B", "G", "R"]
elif self.color_mode == "HSV":
return ["H", "S", "V"]
elif self.color_mode == "LAB":
return ["L", "A", "B"]
return []
def get_max_value(self, channel=None):
if self.color_mode == "HSV":
# H通道范围是0-179,S和V是0-255
return 179 if channel == "H" else 255
return 255
def change_mode(self, mode):
self.color_mode = mode
self.init_slider_values()
self.update_thresholds()
def toggle_camera(self):
if self.is_camera_active:
# 关闭摄像头
if self.video_capture:
self.video_capture.release()
self.video_capture = None
self.is_camera_active = False
self.camera_btn.config(text="启动摄像头", bg="#4CAF50")
else:
# 打开摄像头
self.video_capture = cv2.VideoCapture(0)
if not self.video_capture.isOpened():
tk.messagebox.showerror("错误", "无法打开摄像头,请检查设备是否正常")
self.video_capture = None
return
self.is_camera_active = True
self.camera_btn.config(text="关闭摄像头", bg="#f44336")
self.image = None # 清除已加载的图像
self.update_frame() # 开始更新帧
def load_image(self):
# 关闭摄像头(如果开启)
if self.is_camera_active:
self.toggle_camera()
# 选择并加载图片
file_path = filedialog.askopenfilename(
filetypes=[("图像文件", "*.png;*.jpg;*.jpeg;*.bmp;*.gif")]
)
if file_path:
self.image = cv2.imread(file_path)
if self.image is None:
tk.messagebox.showerror("错误", "无法加载选中的图片")
return
self.update_thresholds()
def update_frame(self):
if self.is_camera_active and self.video_capture.isOpened():
ret, frame = self.video_capture.read()
if ret:
self.image = frame
self.update_thresholds()
# 继续更新帧
self.root.after(30, self.update_frame)
def update_thresholds(self):
if self.image is None:
return
# 复制原图用于显示
original = self.image.copy()
# 根据颜色模式转换图像并应用阈值
if self.color_mode == "HSV":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2HSV)
low = np.array([
self.low_vars["H"].get(),
self.low_vars["S"].get(),
self.low_vars["V"].get()
])
high = np.array([
self.high_vars["H"].get(),
self.high_vars["S"].get(),
self.high_vars["V"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
elif self.color_mode == "灰度":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY)
low = self.gray_low_var.get()
high = self.gray_high_var.get()
_, result = cv2.threshold(processed, low, high, cv2.THRESH_BINARY)
# 转换回BGR以便与原图格式一致
result = cv2.cvtColor(result, cv2.COLOR_GRAY2BGR)
elif self.color_mode == "LAB":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2LAB)
low = np.array([
self.low_vars["L"].get(),
self.low_vars["A"].get(),
self.low_vars["B"].get()
])
high = np.array([
self.high_vars["L"].get(),
self.high_vars["A"].get(),
self.high_vars["B"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
else: # BGR模式
low = np.array([
self.low_vars["B"].get(),
self.low_vars["G"].get(),
self.low_vars["R"].get()
])
high = np.array([
self.high_vars["B"].get(),
self.high_vars["G"].get(),
self.high_vars["R"].get()
])
mask = cv2.inRange(self.image, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
# 显示图像
self.display_image(original, self.original_label)
self.display_image(result, self.processed_label)
def display_image(self, img, label):
# 调整图像大小以适应窗口
img = self.resize_image(img, label)
# 转换OpenCV图像格式为Tkinter可用格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
pil_img = Image.fromarray(img_rgb)
tk_img = ImageTk.PhotoImage(image=pil_img)
# 更新标签图像
label.config(image=tk_img)
label.image = tk_img # 保持引用,防止被垃圾回收
def resize_image(self, img, label):
# 获取显示区域大小
display_width = label.winfo_width()
display_height = label.winfo_height()
# 如果窗口还没初始化,使用默认大小
if display_width <= 1 or display_height <= 1:
display_width = 400
display_height = 300
# 计算调整比例
h, w = img.shape[:2]
ratio = min(display_width / w, display_height / h)
# 调整大小
if ratio < 1:
new_size = (int(w * ratio), int(h * ratio))
return cv2.resize(img, new_size, interpolation=cv2.INTER_AREA)
return img
if __name__ == "__main__":
root = tk.Tk()
# 确保中文显示正常
app = ThresholdEditor(root)
root.mainloop()
注意选取图片的时候,图片路径不要有中文。具体效果如下,退出之前记得记下调好的阈值
然后还有一个注意的点就是,把所有的误差值都加上五百,是为了防止负号或十位数个位数的误差导致UART传输过程或传输后的解码读取过程出错,保证是三位正数,之后在MSPM0端的代码解析之后再减去500就好。
2、控制部分代码(MSPM0)
(1) UART部分
初始化部分
#define UART_INDEX (UART_2 ) // 默认 UART_1
#define UART_BAUDRATE (DEBUG_UART_BAUDRATE) // 默认 115200
#define UART_TX_PIN (UART2_TX_B15 ) // 默认 UART0_TX_A10
#define UART_RX_PIN (UART2_RX_B16 ) // 默认 UART1_RX_A11
#define UART_PRIORITY (UART0_INT_IRQn) // 对应串口中断的中断编号 在 MIMXRT1064.h 头文件中查看 IRQn_Type 枚举体
uint8 uart_get_data[64]; // 串口接收数据缓冲区
uint8 fifo_get_data[64]; // fifo 输出读出缓冲区
uint8 get_data = 0; // 接收数据变量
uint32 fifo_data_count = 0; // fifo 数据个数
fifo_struct uart_data_fifo;
相关函数定义部分
void uart_rx_interrupt_handler (uint32 state, void *ptr)
{
// get_data = uart_read_byte(UART_INDEX); // 接收数据 while 等待式 不建议在中断使用
uart_query_byte(UART_INDEX, &get_data); // 接收数据 查询式 有数据会返回 TRUE 没有数据会返回 FALSE
fifo_write_buffer(&uart_data_fifo, &get_data, 1); // 将数据写入 fifo 中
}
// 解析结果结构体
typedef struct {
bool valid; // 数据是否有效
int first_num; // 前三位数字
int second_num; // 后三位数字
} ParseResult;
// 解析格式为XnnnnnnY的数据(X开头,Y结尾,中间6位数字)
ParseResult parse_xy_data(const char *data) {
ParseResult result = {false, 0, 0};
// 检查数据长度是否正确(X + 6位数字 + Y 共8个字符)
if (strlen(data) != 8) {
return result;
}
// 检查开头是否为'X',结尾是否为'Y'
if (data[0] != 'X' || data[7] != 'Y') {
return result;
}
// 提取中间6位数字并检查是否都是数字
for (int i = 1; i <= 6; i++) {
if (data[i] < '0' || data[i] > '9') {
return result;
}
}
// 提取前三位数字
char first_str[4] = {0};
strncpy(first_str, &data[1], 3);
result.first_num = atoi(first_str);
// 提取后三位数字
char second_str[4] = {0};
strncpy(second_str, &data[4], 3);
result.second_num = atoi(second_str);
// 标记为有效数据
result.valid = true;
return result;
}
主函数部分
uint8 gpio_status;
int main (void)
{
//SYSCFG_DL_init();
clock_init(SYSTEM_CLOCK_80M); // 时钟配置及系统初始化<务必保留>
d36a_init();
//debug_init(); // 调试端口初始化
// 此处编写用户代码 例如外设初始化代码等
fifo_init(&uart_data_fifo, FIFO_DATA_8BIT, uart_get_data, 64); // 初始化 fifo 挂载缓冲区
uart_init(UART_INDEX, UART_BAUDRATE, UART_TX_PIN, UART_RX_PIN); // 初始化串口
uart_set_interrupt_config(UART_INDEX, UART_INTERRUPT_CONFIG_RX_ENABLE); // 使能串口接收中断
interrupt_set_priority(UART_PRIORITY, 0); // 设置对应 UART_INDEX 的中断优先级为 0
uart_set_callback(UART_INDEX, uart_rx_interrupt_handler, NULL); // 定义中断接收函数
// 参数说明:通道、模式、kp(比例)、kpp(二次项)、ki(积分)、kd(微分)、kdd(额外项)、最大输出限制
pid_init(PID_CH_X, PID_POSITIONAL, 0.6f, 0.0f, 0.02f, 0.2f, 0.0f, 200.0f); // X方向PID
pid_init(PID_CH_Y, PID_POSITIONAL, 0.4f, 0.0f, 0.15f, 0.0f, 0.0f, 100.0f); // Y方向PID
// 注:实际参数(0.5f等)需要根据硬件调试,max_limit是输出最大值(如舵机角度范围)
uart_write_string(UART_INDEX, "UART Text."); // 输出测试信息
uart_write_byte(UART_INDEX, '\r'); // 输出回车
uart_write_byte(UART_INDEX, '\n'); // 输出换行
// 此处编写用户代码 例如外设初始化代码等
while(true)
{
fifo_data_count = fifo_used(&uart_data_fifo); // 查看FIFO是否有数据
if(fifo_data_count != 0) // 有数据可读
{
// 从FIFO读取数据(最多读取31字节,留1字节给终止符)
uint32_t read_len = (fifo_data_count > 31) ? 31 : fifo_data_count;
fifo_read_buffer(&uart_data_fifo, fifo_get_data, &read_len, FIFO_READ_AND_CLEAN);
// 添加字符串终止符(确保parse_xy_data能正确识别字符串结尾)
fifo_get_data[read_len] = '\0';
// 解析接收到的数据
ParseResult res = parse_xy_data((const char*)fifo_get_data);
// 定义发送缓冲区(避免栈溢出,固定长度足够存储响应)
char response[50];
if (res.valid)
{
// 解析成功:格式化响应(例如"138,118")
//sprintf(response, "%d,%d\r\n", res.first_num, res.second_num);
//uart_write_string(UART_INDEX, response);
int dx = res.first_num - 128; // 前三位数字减128
int dy = res.second_num - 128; // 后三位数字减128
float pid_out_x = pid_calculate(PID_CH_X, (float)dx); // X方向PID输出
float pid_out_y = pid_calculate(PID_CH_Y, (float)dy); // Y方向PID输出
// 示例:计算output_x=10时的舵机控制量
int ddx = output_to_servo(dx);
int ddy = output_to_servo(dy);
// 5. 使用PID输出(示例:发送到串口查看结果)
float servo_x=ddx*16;
float servo_y=ddy*-16;
int speed_x=map_0_200_to_1000_300(servo_x);
int speed_y=map_0_200_to_1000_300(servo_y);
int speed=min_int(speed_x,speed_y);
d36a_set_angle_both(servo_y,servo_x,speed);
//d36a_set_angle(D36A_MOTOR_B,servo_x,300);
sprintf(response, "dx=%d, dy=%d | sex=%d, sey=%d \r\n",
dx, dy, (int)servo_x, (int)servo_y);
uart_write_string(UART_INDEX, response);
}
}
system_delay_ms(10);
}
}
(2) 计算函数部分
int32_t map_0_200_to_1000_300(int32_t input) {
// 限制输入值在0-200范围内
if (input < 0) {
input = 0;
} else if (input > 200) {
input = 200;
}
// 线性映射公式:output = (input - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
// 这里是反向映射,1000到300
int32_t output = 700 - (input * 550) / 200;
return output;
}
int min_int(int a, int b) {
if (a < b) {
return a;
} else {
return b;
}
}
int output_to_servo(float output_x)
{
// 1. 计算atan2的第一个参数:output_x * 1.8 / 66
float numerator = output_x * 1.8f / 66.0f;
// 2. 计算反正切(atan2(对边, 邻边)),结果为弧度
float radian = atan2f(numerator, 15.0f); // 第二个参数固定为15(与Python一致)
// 3. 将弧度转换为角度(乘以180/π),并转换为整数
int servo_dx = (int)(radian * 180.0f / 3.1415926f); // 用3.1415926提高精度
return servo_dx;
}
void pid_init(uint8_t ch, PID_Mode mode, float kp, float kpp, float ki, float kd, float kdd, float max_limit)
{
if (ch >= PID_MAX_CHANNEL) return;
PID_Controller* pid = &pid_controllers[ch];
memset(pid, 0, sizeof(PID_Controller));
pid->mode = mode;
pid->kp = kp;
pid->kpp = kpp;
pid->ki = ki;
pid->kd = kd;
pid->kdd = kdd;
pid->max_limit = max_limit;
}
float pid_calculate(uint8_t ch, float error)
{
if (ch >= PID_MAX_CHANNEL) return 0.0f;
PID_Controller* pid = &pid_controllers[ch];
// »ý·ÖÀÛ¼Ó
pid->integral += error;
// »ý·ÖÏÞ·ù£¬·ÀÖ¹»ý·Ö±¥ºÍ
if (pid->integral > pid->max_limit) pid->integral = pid->max_limit;
if (pid->integral < -pid->max_limit) pid->integral = -pid->max_limit;
// Îó²î΢·Ö
float derivative = error - pid->prev_error;
// ¼ÆËãÊä³ö
float output = pid->kp * error + pid->ki * pid->integral + pid->kd * derivative ;
// ¸üÐÂÉÏÒ»´ÎÎó²î
pid->prev_error = error;
// ÏÞ·ùÊä³ö
if (output > pid->max_limit) return pid->max_limit;
if (output < -pid->max_limit) return -pid->max_limit;
return output;
}
#define PID_CH_X 0 // X方向PID通道
#define PID_CH_Y 1 // Y方向PID通道
函数解释
一、map_0_200_to_1000_300
将输入值限制在 0200 范围内,再线性反向映射到 1000300 范围(输入越小,输出越大)。
output
700
−
input
×
550
200
\text{output} = 700 - \frac{\text{input} \times 550}{200}
output=700−200input×550
二、min_int
返回两个整数中的较小值
三、output_to_servo
将输入值output_x转换为伺服电机的角度偏移量(基于反正切计算)。
计算对边长度:
numerator
output_x
×
1.8
66.0
\text{numerator} = \frac{\text{output\_x} \times 1.8}{66.0}
numerator=66.0output_x×1.8
计算弧度(反正切):
radian
atan2
(
numerator
,
15.0
)
\text{radian} = \text{atan2}(\text{numerator}, 15.0)
radian=atan2(numerator,15.0)
弧度转角度(整数):
servo_dx
⌊
radian
×
180.0
3.1415926
⌉
(
取整
)
\text{servo\_dx} = \left\lfloor \text{radian} \times \frac{180.0}{3.1415926} \right\rceil \quad (\text{取整})
servo_dx=⌊radian×3.1415926180.0⌉(取整)
四、pid_init
初始化指定通道的 PID 控制器,设置控制模式、比例系数(kp、kpp)、积分系数(ki)、微分系数(kd、kdd)及输出最大值限制。
五、pid_calculate
计算指定通道的 PID 控制器输出,包含积分限幅和输出限幅功能。
积分项累加:
integral
integral
+
error
\text{integral} = \text{integral} + \text{error}
integral=integral+error
积分限幅:
integral
{ max_limit if integral
max_limit
−
max_limit
if integral
<
−
max_limit
integral
otherwise
\text{integral} = \begin{cases} \text{max\_limit} & \text{if } \text{integral} > \text{max\_limit} \ -\text{max\_limit} & \text{if } \text{integral} < -\text{max\_limit} \ \text{integral} & \text{otherwise} \end{cases}
integral=⎩
⎨
⎧max_limit−max_limitintegralif integral>max_limitif integral<−max_limitotherwise
微分项计算:
derivative
error
−
prev_error
\text{derivative} = \text{error} - \text{prev\_error}
derivative=error−prev_error
PID输出:
output
k
p
×
error
+
k
i
×
integral
+
k
d
×
derivative
\text{output} = kp \times \text{error} + ki \times \text{integral} + kd \times \text{derivative}
output=kp×error+ki×integral+kd×derivative
输出限幅:
output
{ max_limit if output
max_limit − max_limit if output < − max_limit output otherwise \text{output} = \begin{cases} \text{max\_limit} & \text{if } \text{output} > \text{max\_limit} \ -\text{max\_limit} & \text{if } \text{output} < -\text{max\_limit} \ \text{output} & \text{otherwise} \end{cases} output=⎩ ⎨ ⎧max_limit−max_limitoutputif output>max_limitif output<−max_limitotherwise
这些函数里面的很多值都是需要根据实际设备调整的,比如*16是因为42电机对角度进行了16细分,需要乘于16才是正常的值,然后pid不用说肯定是要自己调的,output_to_servo中的值也需要根据实际情况进行调整
(3) 控制部分
控制部分的函数只有一个就是d36a_set_angle_both,具体的内容在前两章都讲过这边就不赘述了,可以直接参考之前的博客
MSPM0开发学习笔记:D36A驱动的42步进电机二维云台(2025电赛 附源代码及引脚配置)
值得注意的一点是这个控制是阻塞型的,就是电机需要运动完这个指令才会从openart那边接收到新的误差参数进行下一步调整,并且在接受信息的这一瞬间电机的速度直接就是0,而不是根据误差实时调整频率以及方向,所以效果并不是非常准并且电机会有较大的抖动,虽然大体效果是还可以的但是仍需要精进。后续的博客会发在电赛期间写的非阻塞控制代码,基础部分定位第二题一秒不到第二题2.6秒左右,相对来说还是一个不错的成绩的。
如果无法很好的复现博客里的代码,可以私信作者博取源代码
MSPM0開發學習筆記:二維雲臺結合openmv實現小球追蹤
OpenMV 紅色小球 UART 傳偏差,MSPM0 PID 驅動 D36A 雙路步進二維雲台追蹤,含閾值編輯與阻塞控制說明。
來源:https://blog.csdn.net/2403_87969572/article/details/149900066
抓取時間(ISO本地):2026-05-18 05:17:03
文章目錄
前言
這篇博客的代碼是博主在備賽電賽的時候寫來練手的,結果今年電賽的題目真的差不多,是一個自動瞄準追蹤裝置,因此在比賽結束之後也是用這些代碼寫一下這篇博客。方案是兩個42步進電機採用同一個驅動模塊進行驅動(D36A),主控肯定採用MSPM0G3507。然後3D打印了一個二維雲臺的結構並進行組裝,視覺方面採用openart (後面比賽的時候還是選了樹莓派。openart的幀率實在太低了,最多才10-20幀)。本章博客主要是講這個結合openart和雲臺進行小球追蹤的思路以及代碼。
其實按賽題的要求,雲臺的控制端是可以不使用mspm0系列的芯片進行控制的,完全可以採用openart或者其他模塊直接進行控制,但是由於之前寫的代碼都是mspm0的,所以博主這邊還是採用了mspm0的芯片進行控制(由於還有小車的循跡方面,一塊mspm0的引腳甚至不夠用,最後用了兩塊mspm0,一塊控制小車一塊控制雲臺)
如果無法很好的復現博客裡的代碼,可以私信作者博取源代碼
一、硬件選擇
主控:MSPM0G3507
驅動:D36A雙路步進電機驅動
電機:42步進電機*2
視覺:Openart
二、原理介紹(UART)
這邊主要講UART的通信原理,UART 是短距離設備間常用的異步串行通信協議,無需同步時鐘,僅通過 TX(發送)和 RX(接收)兩根信號線實現雙向通信,本裝置中 Openart 與 MSPM0G3507 即通過它傳輸小球位置信息。
其系統含發送器與接收器:發送器將並行數據轉為串行數據經 TX 發送,接收器通過 RX 接收串行數據並還原為並行數據。
數據以幀傳輸,含起始位(1 位低電平,表傳輸開始)、數據位(5-9 位,常為 8 位有效信息)、校驗位(可選,用於校驗準確性)、停止位(1-2 位高電平,表傳輸結束)。
波特率(單位 bps)是關鍵參數,表每秒傳輸的二進制位數,通信雙方需一致(如本裝置約定 115200bps),否則會出錯。
實際應用中,Openart 識別小球后,按約定幀格式經 TX 發送位置信息;MSPM0G3507 通過 RX 接收並解析,計算雲臺轉動角度,控制步進電機完成追蹤。
三、硬件連線
雲臺部分硬件連線部分在前幾篇篇博客裡面已經說過了,可以直接去上一篇裡面看,這邊附上鍊接
MSPM0開發學習筆記:D36A驅動的42步進電機二維雲臺(2025電賽 附源代碼及引腳配置)
這邊講一下openart和mspm0之間的連線,兩個設備之間採用uart進行通訊,openart上面是有專門用於通信的一個4p接口的。
從左到右分別是5V GND TX RX;我們採用的方案是openart只負責傳遞偏差距離,在mspm0中進行pid計算以及雲臺的控制(這個是為了之後如果openart不適用的話換視覺模塊更加方便,事實證明確實應該這樣處理,同樣的條件下openart只能跑到15幀左右,但是樹莓派連接攝像頭可以跑到100幀,並且通訊的延遲也更低)
用4p的線接出來之後直接連到mspm0上面的對應引腳(注意TX要接RX,RX接TX)就好了(需要選用使用與UART通信的GPIO引腳,引腳之後在代碼中初始化為GPIO引腳的RX和TX)
然後連在mspm0上的線有一點要注意就是,在引腳充足的情況下,儘量避免共用的引腳(下圖左邊有連線的這些),因為說不準會出什麼問題導致後續排查很久。
三、軟件代碼
1、視覺部分代碼(Openart)
視覺部分採用Python語言實現,IDE採用Openmv
具體代碼如下
import sensor
import image
import time
from machine import UART
# 初始化UART,波特率115200,對應設備端口可根據實際調整
uart = UART(2, 115200)
# 初始化攝像頭
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA) # 320x240分辨率
sensor.skip_frames(time=2000)
sensor.set_auto_gain(False) # 關閉自動增益,避免顏色識別受光強影響
sensor.set_auto_whitebal(False) # 關閉自動白平衡
# 紅色HSV閾值範圍(可根據實際環境調整)
red_threshold = (30, 100, 15, 127, 15, 127)
# 圖像中心點座標
center_x = 160
center_y = 120
while True:
img = sensor.snapshot()
# 查找紅色色塊
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200)
if blobs:
# 取最大的色塊作為目標
largest_blob = max(blobs, key=lambda b: b.area())
# 計算色塊中心座標
blob_x = largest_blob.cx()
blob_y = largest_blob.cy()
# 計算與中心點的偏差
dx = blob_x - center_x
dy = blob_y - center_y
# 按要求處理偏差值(加500,確保傳輸為正數)
send_dx = dx + 500
send_dy = dy + 500
# 格式化發送字符串
data_str = "X{}{}Y".format(send_dx, send_dy)
# 通過UART發送數據
uart.write(data_str + "\r\n")
print("發送數據:", data_str) # 調試用
time.sleep(0.05) # 控制發送頻率
代碼解釋:
red_threshold = (30, 100, 15, 127, 15, 127)這邊是顏色閾值,需要根據實際情況進行調整,穩定性不高說實話,因此也可以考慮yolo算法的識別,之後有機會的話也出一期,難度是相對來說比較低的,就是過程會比較麻煩一些。
顏色閾值可以通過openmv IDE自帶的閾值編輯器來得到
在工具這邊選機器視覺,然後裡面有一個閾值編輯器,打開界面如下
白色的是被跟蹤的像素,通過調整滑塊讓需要的顏色變成白色就可以。
也可以選用灰度編輯器(上圖用的是LAB)但是灰度編輯器一般來說用於篩選黑白會更合適(比如這次電賽E題的白色靶子和黑色邊框)
選完之後吧閾值複製一下黏貼到代碼的對應位置就可以了
不過openmvIDE只提供LAB和灰度這兩種閾值編輯器,如果有需要別的比如HSV或者BRG這些的是可以自己用opencv寫一個程序來進行篩選的。
這邊也是寫了一個簡單的閾值編輯器,完整代碼如下:
import cv2
import numpy as np
import tkinter as tk
from tkinter import filedialog
from PIL import Image, ImageTk
class ThresholdEditor:
def __init__(self, root):
self.root = root
self.root.title("OpenCV閾值編輯器")
self.root.geometry("1200x800")
self.root.minsize(1000, 700)
# 初始化變量
self.image = None
self.video_capture = None
self.is_camera_active = False
self.color_mode = "BGR" # 默認模式
# 創建UI組件
self.create_widgets()
# 初始化滑塊值
self.init_slider_values()
def create_widgets(self):
# 創建頂部控制區
control_frame = tk.Frame(self.root, padx=10, pady=5)
control_frame.pack(fill=tk.X)
# 輸入源選擇
input_frame = tk.Frame(control_frame)
input_frame.pack(side=tk.LEFT, padx=10)
tk.Label(input_frame, text="輸入源:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.camera_btn = tk.Button(input_frame, text="啟動攝像頭", command=self.toggle_camera,
bg="#4CAF50", fg="white", padx=8)
self.camera_btn.pack(side=tk.LEFT, padx=5)
self.image_btn = tk.Button(input_frame, text="選擇圖片", command=self.load_image,
bg="#2196F3", fg="white", padx=8)
self.image_btn.pack(side=tk.LEFT, padx=5)
# 顏色模式選擇
mode_frame = tk.Frame(control_frame)
mode_frame.pack(side=tk.LEFT, padx=20)
tk.Label(mode_frame, text="顏色模式:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.mode_var = tk.StringVar(value="BGR")
modes = ["BGR", "HSV", "灰度", "LAB"]
mode_menu = tk.OptionMenu(mode_frame, self.mode_var, *modes, command=self.change_mode)
mode_menu.config(width=8)
mode_menu.pack(side=tk.LEFT, padx=5)
# 創建滑塊區域(帶滾動條)
slider_container = tk.Frame(self.root)
slider_container.pack(fill=tk.X, padx=10, pady=5)
self.slider_canvas = tk.Canvas(slider_container)
scrollbar = tk.Scrollbar(slider_container, orient="horizontal", command=self.slider_canvas.xview)
self.slider_frame = tk.Frame(self.slider_canvas)
self.slider_frame.bind(
"<Configure>",
lambda e: self.slider_canvas.configure(
scrollregion=self.slider_canvas.bbox("all")
)
)
self.slider_canvas.create_window((0, 0), window=self.slider_frame, anchor="nw")
self.slider_canvas.configure(xscrollcommand=scrollbar.set)
self.slider_canvas.pack(side="left", fill="x", expand=True)
scrollbar.pack(side="bottom", fill="x")
# 創建圖像顯示區域
display_frame = tk.Frame(self.root)
display_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=5)
self.original_frame = tk.Frame(display_frame)
self.original_frame.pack(side=tk.LEFT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.original_frame, text="原圖", font=("Arial", 10, "bold")).pack()
self.original_label = tk.Label(self.original_frame, bg="#f0f0f0")
self.original_label.pack(fill=tk.BOTH, expand=True)
self.processed_frame = tk.Frame(display_frame)
self.processed_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.processed_frame, text="閾值處理後", font=("Arial", 10, "bold")).pack()
self.processed_label = tk.Label(self.processed_frame, bg="#f0f0f0")
self.processed_label.pack(fill=tk.BOTH, expand=True)
def init_slider_values(self):
# 清除現有滑塊
for widget in self.slider_frame.winfo_children():
widget.destroy()
# 根據顏色模式創建滑塊
if self.color_mode in ["BGR", "HSV", "LAB"]:
# 三個通道的低閾值
self.low_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
var = tk.IntVar(value=0)
self.low_vars[channel] = var
tk.Label(frame, text=f"低{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=self.get_max_value(channel),
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 三個通道的高閾值
self.high_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
max_val = self.get_max_value(channel)
var = tk.IntVar(value=max_val)
self.high_vars[channel] = var
tk.Label(frame, text=f"高{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=max_val,
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
elif self.color_mode == "灰度":
# 灰度模式只有一個通道
self.gray_low_var = tk.IntVar(value=0)
self.gray_high_var = tk.IntVar(value=255)
# 低閾值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="低閾值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_low_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_low_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 高閾值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="高閾值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_high_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_high_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
def get_channels(self):
if self.color_mode == "BGR":
return ["B", "G", "R"]
elif self.color_mode == "HSV":
return ["H", "S", "V"]
elif self.color_mode == "LAB":
return ["L", "A", "B"]
return []
def get_max_value(self, channel=None):
if self.color_mode == "HSV":
# H通道範圍是0-179,S和V是0-255
return 179 if channel == "H" else 255
return 255
def change_mode(self, mode):
self.color_mode = mode
self.init_slider_values()
self.update_thresholds()
def toggle_camera(self):
if self.is_camera_active:
# 關閉攝像頭
if self.video_capture:
self.video_capture.release()
self.video_capture = None
self.is_camera_active = False
self.camera_btn.config(text="啟動攝像頭", bg="#4CAF50")
else:
# 打開攝像頭
self.video_capture = cv2.VideoCapture(0)
if not self.video_capture.isOpened():
tk.messagebox.showerror("錯誤", "無法打開攝像頭,請檢查設備是否正常")
self.video_capture = None
return
self.is_camera_active = True
self.camera_btn.config(text="關閉攝像頭", bg="#f44336")
self.image = None # 清除已加載的圖像
self.update_frame() # 開始更新幀
def load_image(self):
# 關閉攝像頭(如果開啟)
if self.is_camera_active:
self.toggle_camera()
# 選擇並加載圖片
file_path = filedialog.askopenfilename(
filetypes=[("圖像文件", "*.png;*.jpg;*.jpeg;*.bmp;*.gif")]
)
if file_path:
self.image = cv2.imread(file_path)
if self.image is None:
tk.messagebox.showerror("錯誤", "無法加載選中的圖片")
return
self.update_thresholds()
def update_frame(self):
if self.is_camera_active and self.video_capture.isOpened():
ret, frame = self.video_capture.read()
if ret:
self.image = frame
self.update_thresholds()
# 繼續更新幀
self.root.after(30, self.update_frame)
def update_thresholds(self):
if self.image is None:
return
# 複製原圖用於顯示
original = self.image.copy()
# 根據顏色模式轉換圖像並應用閾值
if self.color_mode == "HSV":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2HSV)
low = np.array([
self.low_vars["H"].get(),
self.low_vars["S"].get(),
self.low_vars["V"].get()
])
high = np.array([
self.high_vars["H"].get(),
self.high_vars["S"].get(),
self.high_vars["V"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
elif self.color_mode == "灰度":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY)
low = self.gray_low_var.get()
high = self.gray_high_var.get()
_, result = cv2.threshold(processed, low, high, cv2.THRESH_BINARY)
# 轉換回BGR以便與原圖格式一致
result = cv2.cvtColor(result, cv2.COLOR_GRAY2BGR)
elif self.color_mode == "LAB":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2LAB)
low = np.array([
self.low_vars["L"].get(),
self.low_vars["A"].get(),
self.low_vars["B"].get()
])
high = np.array([
self.high_vars["L"].get(),
self.high_vars["A"].get(),
self.high_vars["B"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
else: # BGR模式
low = np.array([
self.low_vars["B"].get(),
self.low_vars["G"].get(),
self.low_vars["R"].get()
])
high = np.array([
self.high_vars["B"].get(),
self.high_vars["G"].get(),
self.high_vars["R"].get()
])
mask = cv2.inRange(self.image, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
# 顯示圖像
self.display_image(original, self.original_label)
self.display_image(result, self.processed_label)
def display_image(self, img, label):
# 調整圖像大小以適應窗口
img = self.resize_image(img, label)
# 轉換OpenCV圖像格式為Tkinter可用格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
pil_img = Image.fromarray(img_rgb)
tk_img = ImageTk.PhotoImage(image=pil_img)
# 更新標籤圖像
label.config(image=tk_img)
label.image = tk_img # 保持引用,防止被垃圾回收
def resize_image(self, img, label):
# 獲取顯示區域大小
display_width = label.winfo_width()
display_height = label.winfo_height()
# 如果窗口還沒初始化,使用默認大小
if display_width <= 1 or display_height <= 1:
display_width = 400
display_height = 300
# 計算調整比例
h, w = img.shape[:2]
ratio = min(display_width / w, display_height / h)
# 調整大小
if ratio < 1:
new_size = (int(w * ratio), int(h * ratio))
return cv2.resize(img, new_size, interpolation=cv2.INTER_AREA)
return img
if __name__ == "__main__":
root = tk.Tk()
# 確保中文顯示正常
app = ThresholdEditor(root)
root.mainloop()
注意選取圖片的時候,圖片路徑不要有中文。具體效果如下,退出之前記得記下調好的閾值
然後還有一個注意的點就是,把所有的誤差值都加上五百,是為了防止負號或十位數個位數的誤差導致UART傳輸過程或傳輸後的解碼讀取過程出錯,保證是三位正數,之後在MSPM0端的代碼解析之後再減去500就好。
2、控制部分代碼(MSPM0)
(1) UART部分
初始化部分
#define UART_INDEX (UART_2 ) // 默認 UART_1
#define UART_BAUDRATE (DEBUG_UART_BAUDRATE) // 默認 115200
#define UART_TX_PIN (UART2_TX_B15 ) // 默認 UART0_TX_A10
#define UART_RX_PIN (UART2_RX_B16 ) // 默認 UART1_RX_A11
#define UART_PRIORITY (UART0_INT_IRQn) // 對應串口中斷的中斷編號 在 MIMXRT1064.h 頭文件中查看 IRQn_Type 枚舉體
uint8 uart_get_data[64]; // 串口接收數據緩衝區
uint8 fifo_get_data[64]; // fifo 輸出讀出緩衝區
uint8 get_data = 0; // 接收數據變量
uint32 fifo_data_count = 0; // fifo 數據個數
fifo_struct uart_data_fifo;
相關函數定義部分
void uart_rx_interrupt_handler (uint32 state, void *ptr)
{
// get_data = uart_read_byte(UART_INDEX); // 接收數據 while 等待式 不建議在中斷使用
uart_query_byte(UART_INDEX, &get_data); // 接收數據 查詢式 有數據會返回 TRUE 沒有數據會返回 FALSE
fifo_write_buffer(&uart_data_fifo, &get_data, 1); // 將數據寫入 fifo 中
}
// 解析結果結構體
typedef struct {
bool valid; // 數據是否有效
int first_num; // 前三位數字
int second_num; // 後三位數字
} ParseResult;
// 解析格式為XnnnnnnY的數據(X開頭,Y結尾,中間6位數字)
ParseResult parse_xy_data(const char *data) {
ParseResult result = {false, 0, 0};
// 檢查數據長度是否正確(X + 6位數字 + Y 共8個字符)
if (strlen(data) != 8) {
return result;
}
// 檢查開頭是否為'X',結尾是否為'Y'
if (data[0] != 'X' || data[7] != 'Y') {
return result;
}
// 提取中間6位數字並檢查是否都是數字
for (int i = 1; i <= 6; i++) {
if (data[i] < '0' || data[i] > '9') {
return result;
}
}
// 提取前三位數字
char first_str[4] = {0};
strncpy(first_str, &data[1], 3);
result.first_num = atoi(first_str);
// 提取後三位數字
char second_str[4] = {0};
strncpy(second_str, &data[4], 3);
result.second_num = atoi(second_str);
// 標記為有效數據
result.valid = true;
return result;
}
主函數部分
uint8 gpio_status;
int main (void)
{
//SYSCFG_DL_init();
clock_init(SYSTEM_CLOCK_80M); // 時鐘配置及系統初始化<務必保留>
d36a_init();
//debug_init(); // 調試端口初始化
// 此處編寫用戶代碼 例如外設初始化代碼等
fifo_init(&uart_data_fifo, FIFO_DATA_8BIT, uart_get_data, 64); // 初始化 fifo 掛載緩衝區
uart_init(UART_INDEX, UART_BAUDRATE, UART_TX_PIN, UART_RX_PIN); // 初始化串口
uart_set_interrupt_config(UART_INDEX, UART_INTERRUPT_CONFIG_RX_ENABLE); // 使能串口接收中斷
interrupt_set_priority(UART_PRIORITY, 0); // 設置對應 UART_INDEX 的中斷優先級為 0
uart_set_callback(UART_INDEX, uart_rx_interrupt_handler, NULL); // 定義中斷接收函數
// 參數說明:通道、模式、kp(比例)、kpp(二次項)、ki(積分)、kd(微分)、kdd(額外項)、最大輸出限制
pid_init(PID_CH_X, PID_POSITIONAL, 0.6f, 0.0f, 0.02f, 0.2f, 0.0f, 200.0f); // X方向PID
pid_init(PID_CH_Y, PID_POSITIONAL, 0.4f, 0.0f, 0.15f, 0.0f, 0.0f, 100.0f); // Y方向PID
// 注:實際參數(0.5f等)需要根據硬件調試,max_limit是輸出最大值(如舵機角度範圍)
uart_write_string(UART_INDEX, "UART Text."); // 輸出測試信息
uart_write_byte(UART_INDEX, '\r'); // 輸出回車
uart_write_byte(UART_INDEX, '\n'); // 輸出換行
// 此處編寫用戶代碼 例如外設初始化代碼等
while(true)
{
fifo_data_count = fifo_used(&uart_data_fifo); // 查看FIFO是否有數據
if(fifo_data_count != 0) // 有數據可讀
{
// 從FIFO讀取數據(最多讀取31字節,留1字節給終止符)
uint32_t read_len = (fifo_data_count > 31) ? 31 : fifo_data_count;
fifo_read_buffer(&uart_data_fifo, fifo_get_data, &read_len, FIFO_READ_AND_CLEAN);
// 添加字符串終止符(確保parse_xy_data能正確識別字符串結尾)
fifo_get_data[read_len] = '\0';
// 解析接收到的數據
ParseResult res = parse_xy_data((const char*)fifo_get_data);
// 定義發送緩衝區(避免棧溢出,固定長度足夠存儲響應)
char response[50];
if (res.valid)
{
// 解析成功:格式化響應(例如"138,118")
//sprintf(response, "%d,%d\r\n", res.first_num, res.second_num);
//uart_write_string(UART_INDEX, response);
int dx = res.first_num - 128; // 前三位數字減128
int dy = res.second_num - 128; // 後三位數字減128
float pid_out_x = pid_calculate(PID_CH_X, (float)dx); // X方向PID輸出
float pid_out_y = pid_calculate(PID_CH_Y, (float)dy); // Y方向PID輸出
// 示例:計算output_x=10時的舵機控制量
int ddx = output_to_servo(dx);
int ddy = output_to_servo(dy);
// 5. 使用PID輸出(示例:發送到串口查看結果)
float servo_x=ddx*16;
float servo_y=ddy*-16;
int speed_x=map_0_200_to_1000_300(servo_x);
int speed_y=map_0_200_to_1000_300(servo_y);
int speed=min_int(speed_x,speed_y);
d36a_set_angle_both(servo_y,servo_x,speed);
//d36a_set_angle(D36A_MOTOR_B,servo_x,300);
sprintf(response, "dx=%d, dy=%d | sex=%d, sey=%d \r\n",
dx, dy, (int)servo_x, (int)servo_y);
uart_write_string(UART_INDEX, response);
}
}
system_delay_ms(10);
}
}
(2) 計算函數部分
int32_t map_0_200_to_1000_300(int32_t input) {
// 限制輸入值在0-200範圍內
if (input < 0) {
input = 0;
} else if (input > 200) {
input = 200;
}
// 線性映射公式:output = (input - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
// 這裡是反向映射,1000到300
int32_t output = 700 - (input * 550) / 200;
return output;
}
int min_int(int a, int b) {
if (a < b) {
return a;
} else {
return b;
}
}
int output_to_servo(float output_x)
{
// 1. 計算atan2的第一個參數:output_x * 1.8 / 66
float numerator = output_x * 1.8f / 66.0f;
// 2. 計算反正切(atan2(對邊, 鄰邊)),結果為弧度
float radian = atan2f(numerator, 15.0f); // 第二個參數固定為15(與Python一致)
// 3. 將弧度轉換為角度(乘以180/π),並轉換為整數
int servo_dx = (int)(radian * 180.0f / 3.1415926f); // 用3.1415926提高精度
return servo_dx;
}
void pid_init(uint8_t ch, PID_Mode mode, float kp, float kpp, float ki, float kd, float kdd, float max_limit)
{
if (ch >= PID_MAX_CHANNEL) return;
PID_Controller* pid = &pid_controllers[ch];
memset(pid, 0, sizeof(PID_Controller));
pid->mode = mode;
pid->kp = kp;
pid->kpp = kpp;
pid->ki = ki;
pid->kd = kd;
pid->kdd = kdd;
pid->max_limit = max_limit;
}
float pid_calculate(uint8_t ch, float error)
{
if (ch >= PID_MAX_CHANNEL) return 0.0f;
PID_Controller* pid = &pid_controllers[ch];
// »ý·ÖÀÛ¼Ó
pid->integral += error;
// »ý·ÖÏÞ·ù£¬·ÀÖ¹»ý·Ö±¥ºÍ
if (pid->integral > pid->max_limit) pid->integral = pid->max_limit;
if (pid->integral < -pid->max_limit) pid->integral = -pid->max_limit;
// Îó²î΢·Ö
float derivative = error - pid->prev_error;
// ¼ÆËãÊä³ö
float output = pid->kp * error + pid->ki * pid->integral + pid->kd * derivative ;
// ¸üÐÂÉÏÒ»´ÎÎó²î
pid->prev_error = error;
// ÏÞ·ùÊä³ö
if (output > pid->max_limit) return pid->max_limit;
if (output < -pid->max_limit) return -pid->max_limit;
return output;
}
#define PID_CH_X 0 // X方向PID通道
#define PID_CH_Y 1 // Y方向PID通道
函數解釋
一、map_0_200_to_1000_300
將輸入值限制在 0200 範圍內,再線性反向映射到 1000300 範圍(輸入越小,輸出越大)。
output
700
−
input
×
550
200
\text{output} = 700 - \frac{\text{input} \times 550}{200}
output=700−200input×550
二、min_int
返回兩個整數中的較小值
三、output_to_servo
將輸入值output_x轉換為伺服電機的角度偏移量(基於反正切計算)。
計算對邊長度:
numerator
output_x
×
1.8
66.0
\text{numerator} = \frac{\text{output\_x} \times 1.8}{66.0}
numerator=66.0output_x×1.8
計算弧度(反正切):
radian
atan2
(
numerator
,
15.0
)
\text{radian} = \text{atan2}(\text{numerator}, 15.0)
radian=atan2(numerator,15.0)
弧度轉角度(整數):
servo_dx
⌊
radian
×
180.0
3.1415926
⌉
(
取整
)
\text{servo\_dx} = \left\lfloor \text{radian} \times \frac{180.0}{3.1415926} \right\rceil \quad (\text{取整})
servo_dx=⌊radian×3.1415926180.0⌉(取整)
四、pid_init
初始化指定通道的 PID 控制器,設置控制模式、比例係數(kp、kpp)、積分系數(ki)、微分系數(kd、kdd)及輸出最大值限制。
五、pid_calculate
計算指定通道的 PID 控制器輸出,包含積分限幅和輸出限幅功能。
積分項累加:
integral
integral
+
error
\text{integral} = \text{integral} + \text{error}
integral=integral+error
積分限幅:
integral
{ max_limit if integral
max_limit
−
max_limit
if integral
<
−
max_limit
integral
otherwise
\text{integral} = \begin{cases} \text{max\_limit} & \text{if } \text{integral} > \text{max\_limit} \ -\text{max\_limit} & \text{if } \text{integral} < -\text{max\_limit} \ \text{integral} & \text{otherwise} \end{cases}
integral=⎩
⎨
⎧max_limit−max_limitintegralif integral>max_limitif integral<−max_limitotherwise
微分項計算:
derivative
error
−
prev_error
\text{derivative} = \text{error} - \text{prev\_error}
derivative=error−prev_error
PID輸出:
output
k
p
×
error
+
k
i
×
integral
+
k
d
×
derivative
\text{output} = kp \times \text{error} + ki \times \text{integral} + kd \times \text{derivative}
output=kp×error+ki×integral+kd×derivative
輸出限幅:
output
{ max_limit if output
max_limit − max_limit if output < − max_limit output otherwise \text{output} = \begin{cases} \text{max\_limit} & \text{if } \text{output} > \text{max\_limit} \ -\text{max\_limit} & \text{if } \text{output} < -\text{max\_limit} \ \text{output} & \text{otherwise} \end{cases} output=⎩ ⎨ ⎧max_limit−max_limitoutputif output>max_limitif output<−max_limitotherwise
這些函數里面的很多值都是需要根據實際設備調整的,比如*16是因為42電機對角度進行了16細分,需要乘於16才是正常的值,然後pid不用說肯定是要自己調的,output_to_servo中的值也需要根據實際情況進行調整
(3) 控制部分
控制部分的函數只有一個就是d36a_set_angle_both,具體的內容在前兩章都講過這邊就不贅述了,可以直接參考之前的博客
MSPM0開發學習筆記:D36A驅動的42步進電機二維雲臺(2025電賽 附源代碼及引腳配置)
值得注意的一點是這個控制是阻塞型的,就是電機需要運動完這個指令才會從openart那邊接收到新的誤差參數進行下一步調整,並且在接受信息的這一瞬間電機的速度直接就是0,而不是根據誤差實時調整頻率以及方向,所以效果並不是非常準並且電機會有較大的抖動,雖然大體效果是還可以的但是仍需要精進。後續的博客會發在電賽期間寫的非阻塞控制代碼,基礎部分定位第二題一秒不到第二題2.6秒左右,相對來說還是一個不錯的成績的。
如果無法很好的復現博客裡的代碼,可以私信作者博取源代碼
MSPM0 Dev Notes: 2-Axis Gimbal + OpenMV Ball Tracking
OpenMV sends ball offset over UART; MSPM0 PID drives a D36A dual-stepper gimbal for tracking, with threshold tuning notes.
Captured at (local ISO): 2026-05-18 05:17:03
Preface
This code was practice for the National Undergrad Electronics Design Contest. The year’s problem resembled an auto-aim / tracking turret—so after the event I turned the prototype into this article. Hardware: two NEMA-17 steppers on one D36A dual driver; MCU MSPM0G3507. I 3-D printed a 2-axis gimbal and used OpenMV (OpenART) for vision—during the actual contest I ended up on Raspberry Pi because the OpenMV-class camera topped out around 10–20 FPS. This chapter focuses on the OpenMV + gimbal ball-tracking idea and code.
The contest rules did not force MSPM0 on the gimbal—OpenMV alone could close the loop—but I’d already invested in MSPM0 code, so the MCU stayed on the turret. (The rover also needed an MSPM0; IO ran tight and I finally used two MSPM0s—one rover, one gimbal.)
If you cannot reproduce the snippets here, DM the author for the full project bundle.
I. Hardware
- MCU: MSPM0G3507
- Driver: D36A dual stepper driver
- Motors: NEMA-17 × 2
- Vision: OpenART / OpenMV module
II. UART primer
UART is the usual short-range asynchronous serial link—no separate clock, just TX/RX. Here OpenMV streams blob-error vectors to MSPM0, which turns them into gimbal motion.
Frames carry start bit, 5–9 data bits, optional parity, stop bits. Baud (e.g., 115200) must match on both sides.
III. Wiring
Mechanical and motor wiring was covered in the companion post:
MSPM0 notes — D36A 2-axis gimbal (2025 contest, source + pinout)
OpenMV ↔ MSPM0: UART on the module’s 4-pin port (left→right 5V, GND, TX, RX):
We send plain numeric offsets from OpenMV; PID + motion live on MSPM0 so vision hardware is easy to swap. (OpenMV held ~15 FPS here vs ~100 FPS camera on Pi under the same rough conditions—and lower comm latency on the Pi path.)
Cross TX/RX, pick any UART-capable pins, then configure those pins in firmware.
Avoid pin conflicts with shared functions when you still have headroom—shared pins made debug painful:
III. Software
1. Vision (OpenMV IDE / MicroPython)
Python on-device; IDE OpenMV. Tracking snippet:
import sensor
import image
import time
from machine import UART
# 初始化UART,波特率115200,对应设备端口可根据实际调整
uart = UART(2, 115200)
# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA) # 320x240分辨率
sensor.skip_frames(time=2000)
sensor.set_auto_gain(False) # 关闭自动增益,避免颜色识别受光强影响
sensor.set_auto_whitebal(False) # 关闭自动白平衡
# 红色HSV阈值范围(可根据实际环境调整)
red_threshold = (30, 100, 15, 127, 15, 127)
# 图像中心点坐标
center_x = 160
center_y = 120
while True:
img = sensor.snapshot()
# 查找红色色块
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200)
if blobs:
# 取最大的色块作为目标
largest_blob = max(blobs, key=lambda b: b.area())
# 计算色块中心坐标
blob_x = largest_blob.cx()
blob_y = largest_blob.cy()
# 计算与中心点的偏差
dx = blob_x - center_x
dy = blob_y - center_y
# 按要求处理偏差值(加500,确保传输为正数)
send_dx = dx + 500
send_dy = dy + 500
# 格式化发送字符串
data_str = "X{}{}Y".format(send_dx, send_dy)
# 通过UART发送数据
uart.write(data_str + "\r\n")
print("发送数据:", data_str) # 调试用
time.sleep(0.05) # 控制发送频率Explainer
red_threshold = (30, 100, 15, 127, 15, 127) is a color threshold—tune per lighting; it’s finicky, so a YOLO path is a natural upgrade (future post—more setup, moderate difficulty).
Use OpenMV IDE → Tools → Machine Vision → Threshold Editor to pick thresholds:
White pixels are in-range—slide until your target fills white. Grayscale mode suits B/W games (e.g., white bullseye / black rim on the 2025 Problem E flavor).
Copy the tuple into code.
IDE ships LAB + grayscale editors only; for HSV/BGR tuning on PC, roll your own OpenCV UI. Minimal desktop editor:
import cv2
import numpy as np
import tkinter as tk
from tkinter import filedialog
from PIL import Image, ImageTk
class ThresholdEditor:
def __init__(self, root):
self.root = root
self.root.title("OpenCV阈值编辑器")
self.root.geometry("1200x800")
self.root.minsize(1000, 700)
# 初始化变量
self.image = None
self.video_capture = None
self.is_camera_active = False
self.color_mode = "BGR" # 默认模式
# 创建UI组件
self.create_widgets()
# 初始化滑块值
self.init_slider_values()
def create_widgets(self):
# 创建顶部控制区
control_frame = tk.Frame(self.root, padx=10, pady=5)
control_frame.pack(fill=tk.X)
# 输入源选择
input_frame = tk.Frame(control_frame)
input_frame.pack(side=tk.LEFT, padx=10)
tk.Label(input_frame, text="输入源:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.camera_btn = tk.Button(input_frame, text="启动摄像头", command=self.toggle_camera,
bg="#4CAF50", fg="white", padx=8)
self.camera_btn.pack(side=tk.LEFT, padx=5)
self.image_btn = tk.Button(input_frame, text="选择图片", command=self.load_image,
bg="#2196F3", fg="white", padx=8)
self.image_btn.pack(side=tk.LEFT, padx=5)
# 颜色模式选择
mode_frame = tk.Frame(control_frame)
mode_frame.pack(side=tk.LEFT, padx=20)
tk.Label(mode_frame, text="颜色模式:", font=("Arial", 10, "bold")).pack(side=tk.LEFT, padx=5)
self.mode_var = tk.StringVar(value="BGR")
modes = ["BGR", "HSV", "灰度", "LAB"]
mode_menu = tk.OptionMenu(mode_frame, self.mode_var, *modes, command=self.change_mode)
mode_menu.config(width=8)
mode_menu.pack(side=tk.LEFT, padx=5)
# 创建滑块区域(带滚动条)
slider_container = tk.Frame(self.root)
slider_container.pack(fill=tk.X, padx=10, pady=5)
self.slider_canvas = tk.Canvas(slider_container)
scrollbar = tk.Scrollbar(slider_container, orient="horizontal", command=self.slider_canvas.xview)
self.slider_frame = tk.Frame(self.slider_canvas)
self.slider_frame.bind(
"<Configure>",
lambda e: self.slider_canvas.configure(
scrollregion=self.slider_canvas.bbox("all")
)
)
self.slider_canvas.create_window((0, 0), window=self.slider_frame, anchor="nw")
self.slider_canvas.configure(xscrollcommand=scrollbar.set)
self.slider_canvas.pack(side="left", fill="x", expand=True)
scrollbar.pack(side="bottom", fill="x")
# 创建图像显示区域
display_frame = tk.Frame(self.root)
display_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=5)
self.original_frame = tk.Frame(display_frame)
self.original_frame.pack(side=tk.LEFT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.original_frame, text="原图", font=("Arial", 10, "bold")).pack()
self.original_label = tk.Label(self.original_frame, bg="#f0f0f0")
self.original_label.pack(fill=tk.BOTH, expand=True)
self.processed_frame = tk.Frame(display_frame)
self.processed_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=5)
tk.Label(self.processed_frame, text="阈值处理后", font=("Arial", 10, "bold")).pack()
self.processed_label = tk.Label(self.processed_frame, bg="#f0f0f0")
self.processed_label.pack(fill=tk.BOTH, expand=True)
def init_slider_values(self):
# 清除现有滑块
for widget in self.slider_frame.winfo_children():
widget.destroy()
# 根据颜色模式创建滑块
if self.color_mode in ["BGR", "HSV", "LAB"]:
# 三个通道的低阈值
self.low_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
var = tk.IntVar(value=0)
self.low_vars[channel] = var
tk.Label(frame, text=f"低{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=self.get_max_value(channel),
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 三个通道的高阈值
self.high_vars = {}
for channel in self.get_channels():
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
max_val = self.get_max_value(channel)
var = tk.IntVar(value=max_val)
self.high_vars[channel] = var
tk.Label(frame, text=f"高{channel}:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=max_val,
variable=var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
elif self.color_mode == "灰度":
# 灰度模式只有一个通道
self.gray_low_var = tk.IntVar(value=0)
self.gray_high_var = tk.IntVar(value=255)
# 低阈值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="低阈值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_low_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_low_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
# 高阈值
frame = tk.Frame(self.slider_frame)
frame.pack(side=tk.LEFT, padx=10)
tk.Label(frame, text="高阈值:", width=8).pack(anchor=tk.W)
slider = tk.Scale(frame, from_=0, to=255,
variable=self.gray_high_var, orient=tk.HORIZONTAL, length=200,
command=lambda _: self.update_thresholds())
slider.pack()
tk.Label(frame, textvariable=self.gray_high_var, width=5, borderwidth=2, relief="sunken").pack(pady=5)
def get_channels(self):
if self.color_mode == "BGR":
return ["B", "G", "R"]
elif self.color_mode == "HSV":
return ["H", "S", "V"]
elif self.color_mode == "LAB":
return ["L", "A", "B"]
return []
def get_max_value(self, channel=None):
if self.color_mode == "HSV":
# H通道范围是0-179,S和V是0-255
return 179 if channel == "H" else 255
return 255
def change_mode(self, mode):
self.color_mode = mode
self.init_slider_values()
self.update_thresholds()
def toggle_camera(self):
if self.is_camera_active:
# 关闭摄像头
if self.video_capture:
self.video_capture.release()
self.video_capture = None
self.is_camera_active = False
self.camera_btn.config(text="启动摄像头", bg="#4CAF50")
else:
# 打开摄像头
self.video_capture = cv2.VideoCapture(0)
if not self.video_capture.isOpened():
tk.messagebox.showerror("错误", "无法打开摄像头,请检查设备是否正常")
self.video_capture = None
return
self.is_camera_active = True
self.camera_btn.config(text="关闭摄像头", bg="#f44336")
self.image = None # 清除已加载的图像
self.update_frame() # 开始更新帧
def load_image(self):
# 关闭摄像头(如果开启)
if self.is_camera_active:
self.toggle_camera()
# 选择并加载图片
file_path = filedialog.askopenfilename(
filetypes=[("图像文件", "*.png;*.jpg;*.jpeg;*.bmp;*.gif")]
)
if file_path:
self.image = cv2.imread(file_path)
if self.image is None:
tk.messagebox.showerror("错误", "无法加载选中的图片")
return
self.update_thresholds()
def update_frame(self):
if self.is_camera_active and self.video_capture.isOpened():
ret, frame = self.video_capture.read()
if ret:
self.image = frame
self.update_thresholds()
# 继续更新帧
self.root.after(30, self.update_frame)
def update_thresholds(self):
if self.image is None:
return
# 复制原图用于显示
original = self.image.copy()
# 根据颜色模式转换图像并应用阈值
if self.color_mode == "HSV":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2HSV)
low = np.array([
self.low_vars["H"].get(),
self.low_vars["S"].get(),
self.low_vars["V"].get()
])
high = np.array([
self.high_vars["H"].get(),
self.high_vars["S"].get(),
self.high_vars["V"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
elif self.color_mode == "灰度":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY)
low = self.gray_low_var.get()
high = self.gray_high_var.get()
_, result = cv2.threshold(processed, low, high, cv2.THRESH_BINARY)
# 转换回BGR以便与原图格式一致
result = cv2.cvtColor(result, cv2.COLOR_GRAY2BGR)
elif self.color_mode == "LAB":
processed = cv2.cvtColor(self.image, cv2.COLOR_BGR2LAB)
low = np.array([
self.low_vars["L"].get(),
self.low_vars["A"].get(),
self.low_vars["B"].get()
])
high = np.array([
self.high_vars["L"].get(),
self.high_vars["A"].get(),
self.high_vars["B"].get()
])
mask = cv2.inRange(processed, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
else: # BGR模式
low = np.array([
self.low_vars["B"].get(),
self.low_vars["G"].get(),
self.low_vars["R"].get()
])
high = np.array([
self.high_vars["B"].get(),
self.high_vars["G"].get(),
self.high_vars["R"].get()
])
mask = cv2.inRange(self.image, low, high)
result = cv2.bitwise_and(original, original, mask=mask)
# 显示图像
self.display_image(original, self.original_label)
self.display_image(result, self.processed_label)
def display_image(self, img, label):
# 调整图像大小以适应窗口
img = self.resize_image(img, label)
# 转换OpenCV图像格式为Tkinter可用格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
pil_img = Image.fromarray(img_rgb)
tk_img = ImageTk.PhotoImage(image=pil_img)
# 更新标签图像
label.config(image=tk_img)
label.image = tk_img # 保持引用,防止被垃圾回收
def resize_image(self, img, label):
# 获取显示区域大小
display_width = label.winfo_width()
display_height = label.winfo_height()
# 如果窗口还没初始化,使用默认大小
if display_width <= 1 or display_height <= 1:
display_width = 400
display_height = 300
# 计算调整比例
h, w = img.shape[:2]
ratio = min(display_width / w, display_height / h)
# 调整大小
if ratio < 1:
new_size = (int(w * ratio), int(h * ratio))
return cv2.resize(img, new_size, interpolation=cv2.INTER_AREA)
return img
if __name__ == "__main__":
root = tk.Tk()
# 确保中文显示正常
app = ThresholdEditor(root)
root.mainloop()Pick image paths without Chinese characters in the path string. Example UI—write down your final tuples before closing:
Offset +500: forces three-digit nonnegative payloads so UART framing/parsing never sees stray '-' mishandling—subtract 500 on the MCU after decode.
2. Control (MSPM0)
(1) UART
Init
#define UART_INDEX (UART_2 ) // 默认 UART_1
#define UART_BAUDRATE (DEBUG_UART_BAUDRATE) // 默认 115200
#define UART_TX_PIN (UART2_TX_B15 ) // 默认 UART0_TX_A10
#define UART_RX_PIN (UART2_RX_B16 ) // 默认 UART1_RX_A11
#define UART_PRIORITY (UART0_INT_IRQn) // 对应串口中断的中断编号 在 MIMXRT1064.h 头文件中查看 IRQn_Type 枚举体
uint8 uart_get_data[64]; // 串口接收数据缓冲区
uint8 fifo_get_data[64]; // fifo 输出读出缓冲区
uint8 get_data = 0; // 接收数据变量
uint32 fifo_data_count = 0; // fifo 数据个数
fifo_struct uart_data_fifo;Helpers
void uart_rx_interrupt_handler (uint32 state, void *ptr)
{
// get_data = uart_read_byte(UART_INDEX); // 接收数据 while 等待式 不建议在中断使用
uart_query_byte(UART_INDEX, &get_data); // 接收数据 查询式 有数据会返回 TRUE 没有数据会返回 FALSE
fifo_write_buffer(&uart_data_fifo, &get_data, 1); // 将数据写入 fifo 中
}
// 解析结果结构体
typedef struct {
bool valid; // 数据是否有效
int first_num; // 前三位数字
int second_num; // 后三位数字
} ParseResult;
// 解析格式为XnnnnnnY的数据(X开头,Y结尾,中间6位数字)
ParseResult parse_xy_data(const char *data) {
ParseResult result = {false, 0, 0};
// 检查数据长度是否正确(X + 6位数字 + Y 共8个字符)
if (strlen(data) != 8) {
return result;
}
// 检查开头是否为'X',结尾是否为'Y'
if (data[0] != 'X' || data[7] != 'Y') {
return result;
}
// 提取中间6位数字并检查是否都是数字
for (int i = 1; i <= 6; i++) {
if (data[i] < '0' || data[i] > '9') {
return result;
}
}
// 提取前三位数字
char first_str[4] = {0};
strncpy(first_str, &data[1], 3);
result.first_num = atoi(first_str);
// 提取后三位数字
char second_str[4] = {0};
strncpy(second_str, &data[4], 3);
result.second_num = atoi(second_str);
// 标记为有效数据
result.valid = true;
return result;
}main loop
uint8 gpio_status;
int main (void)
{
//SYSCFG_DL_init();
clock_init(SYSTEM_CLOCK_80M); // 时钟配置及系统初始化<务必保留>
d36a_init();
//debug_init(); // 调试端口初始化
// 此处编写用户代码 例如外设初始化代码等
fifo_init(&uart_data_fifo, FIFO_DATA_8BIT, uart_get_data, 64); // 初始化 fifo 挂载缓冲区
uart_init(UART_INDEX, UART_BAUDRATE, UART_TX_PIN, UART_RX_PIN); // 初始化串口
uart_set_interrupt_config(UART_INDEX, UART_INTERRUPT_CONFIG_RX_ENABLE); // 使能串口接收中断
interrupt_set_priority(UART_PRIORITY, 0); // 设置对应 UART_INDEX 的中断优先级为 0
uart_set_callback(UART_INDEX, uart_rx_interrupt_handler, NULL); // 定义中断接收函数
// 参数说明:通道、模式、kp(比例)、kpp(二次项)、ki(积分)、kd(微分)、kdd(额外项)、最大输出限制
pid_init(PID_CH_X, PID_POSITIONAL, 0.6f, 0.0f, 0.02f, 0.2f, 0.0f, 200.0f); // X方向PID
pid_init(PID_CH_Y, PID_POSITIONAL, 0.4f, 0.0f, 0.15f, 0.0f, 0.0f, 100.0f); // Y方向PID
// 注:实际参数(0.5f等)需要根据硬件调试,max_limit是输出最大值(如舵机角度范围)
uart_write_string(UART_INDEX, "UART Text."); // 输出测试信息
uart_write_byte(UART_INDEX, '\r'); // 输出回车
uart_write_byte(UART_INDEX, '\n'); // 输出换行
// 此处编写用户代码 例如外设初始化代码等
while(true)
{
fifo_data_count = fifo_used(&uart_data_fifo); // 查看FIFO是否有数据
if(fifo_data_count != 0) // 有数据可读
{
// 从FIFO读取数据(最多读取31字节,留1字节给终止符)
uint32_t read_len = (fifo_data_count > 31) ? 31 : fifo_data_count;
fifo_read_buffer(&uart_data_fifo, fifo_get_data, &read_len, FIFO_READ_AND_CLEAN);
// 添加字符串终止符(确保parse_xy_data能正确识别字符串结尾)
fifo_get_data[read_len] = '\0';
// 解析接收到的数据
ParseResult res = parse_xy_data((const char*)fifo_get_data);
// 定义发送缓冲区(避免栈溢出,固定长度足够存储响应)
char response[50];
if (res.valid)
{
// 解析成功:格式化响应(例如"138,118")
//sprintf(response, "%d,%d\r\n", res.first_num, res.second_num);
//uart_write_string(UART_INDEX, response);
int dx = res.first_num - 128; // 前三位数字减128
int dy = res.second_num - 128; // 后三位数字减128
float pid_out_x = pid_calculate(PID_CH_X, (float)dx); // X方向PID输出
float pid_out_y = pid_calculate(PID_CH_Y, (float)dy); // Y方向PID输出
// 示例:计算output_x=10时的舵机控制量
int ddx = output_to_servo(dx);
int ddy = output_to_servo(dy);
// 5. 使用PID输出(示例:发送到串口查看结果)
float servo_x=ddx*16;
float servo_y=ddy*-16;
int speed_x=map_0_200_to_1000_300(servo_x);
int speed_y=map_0_200_to_1000_300(servo_y);
int speed=min_int(speed_x,speed_y);
d36a_set_angle_both(servo_y,servo_x,speed);
//d36a_set_angle(D36A_MOTOR_B,servo_x,300);
sprintf(response, "dx=%d, dy=%d | sex=%d, sey=%d \r\n",
dx, dy, (int)servo_x, (int)servo_y);
uart_write_string(UART_INDEX, response);
}
}
system_delay_ms(10);
}
}(2) Mapping + PID
int32_t map_0_200_to_1000_300(int32_t input) {
// 限制输入值在0-200范围内
if (input < 0) {
input = 0;
} else if (input > 200) {
input = 200;
}
// 线性映射公式:output = (input - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
// 这里是反向映射,1000到300
int32_t output = 700 - (input * 550) / 200;
return output;
}
int min_int(int a, int b) {
if (a < b) {
return a;
} else {
return b;
}
}
int output_to_servo(float output_x)
{
// 1. 计算atan2的第一个参数:output_x * 1.8 / 66
float numerator = output_x * 1.8f / 66.0f;
// 2. 计算反正切(atan2(对边, 邻边)),结果为弧度
float radian = atan2f(numerator, 15.0f); // 第二个参数固定为15(与Python一致)
// 3. 将弧度转换为角度(乘以180/π),并转换为整数
int servo_dx = (int)(radian * 180.0f / 3.1415926f); // 用3.1415926提高精度
return servo_dx;
}
void pid_init(uint8_t ch, PID_Mode mode, float kp, float kpp, float ki, float kd, float kdd, float max_limit)
{
if (ch >= PID_MAX_CHANNEL) return;
PID_Controller* pid = &pid_controllers[ch];
memset(pid, 0, sizeof(PID_Controller));
pid->mode = mode;
pid->kp = kp;
pid->kpp = kpp;
pid->ki = ki;
pid->kd = kd;
pid->kdd = kdd;
pid->max_limit = max_limit;
}
float pid_calculate(uint8_t ch, float error)
{
if (ch >= PID_MAX_CHANNEL) return 0.0f;
PID_Controller* pid = &pid_controllers[ch];
// »ý·ÖÀÛ¼Ó
pid->integral += error;
// »ý·ÖÏÞ·ù£¬·ÀÖ¹»ý·Ö±¥ºÍ
if (pid->integral > pid->max_limit) pid->integral = pid->max_limit;
if (pid->integral < -pid->max_limit) pid->integral = -pid->max_limit;
// Îó²î΢·Ö
float derivative = error - pid->prev_error;
// ¼ÆËãÊä³ö
float output = pid->kp * error + pid->ki * pid->integral + pid->kd * derivative ;
// ¸üÐÂÉÏÒ»´ÎÎó²î
pid->prev_error = error;
// ÏÞ·ùÊä³ö
if (output > pid->max_limit) return pid->max_limit;
if (output < -pid->max_limit) return -pid->max_limit;
return output;
}
#define PID_CH_X 0 // X方向PID通道
#define PID_CH_Y 1 // Y方向PID通道Function notes
-
map_0_200_to_1000_300: clamp to [0, 200], then invert-linear map to [1000, 300] — smaller input → larger output using
(\text{output} = 700 - \dfrac{\text{input} \cdot 550}{200}). -
min_int: min of two ints. -
output_to_servo: turn a control scalar into a tilt angle using (\text{atan2}):
(\text{numerator} = \dfrac{\text{output_x} \cdot 1.8}{66}), (\text{radian} = \mathrm{atan2}(\text{numerator}, 15)), then degrees with (\frac{180}{\pi}). -
pid_init: zero controller, stash gains and output clamp. -
pid_calculate: textbook PI+D-ish loop—integrator with anti-windup to±max_limit, derivative on error, output clamp.
Most magic numbers are mechanism-specific—the ×16 aligns with 1/16 micro-stepping on the 42-class motor; PID and output_to_servo geometry need your own bring-up.
(3) d36a_set_angle_both
Only d36a_set_angle_both finally moves both axes—details in the gimbal article above.
Caveat: this call is blocking—the MCU finishes the move before the next OpenMV packet is honored; between packets speed hits zero instead of streaming a continuous velocity profile—some jitter and imperfect tracking, though the demo sort of works. A later post will share non-blocking motion from the contest sprint (Problem 2 settle ≲1 s, full Problem 2 ≈2.6 s).
If you cannot reproduce the snippets here, DM the author for the full project bundle.