CubeSat proximity pose estimation & docking control (16U OSS platform)
16U RVD & proximity GNC: vision pose & Jetson deployment, CKF fusion, electrospray control; IAC, ICGNC, and other papers plus multiple invention patents.
Background
As space technology and commercial spaceflight advance, on-orbit servicing (OOS) demand is growing: large servicing spacecraft are mature and reliable but costly, less risk-tolerant, and poorly suited to rapid response; CubeSats are low-cost with short development cycles, yet volume and budget limits still block reusable buses with full docking and servicing capability. On propulsion, chemical systems face clear CubeSat constraints, while water-fed electric thrusters—non-toxic, multimodal, and amenable to in-situ water use—are emerging as a strong option. This program develops a CubeSat OOS platform with multimodal water-based propulsion and a multifunction docking interface, validating propulsion, docking, and rendezvous–docking algorithms in a dual-satellite on-orbit demo to support future high-cadence missions such as debris removal, on-orbit refueling, and spacecraft rescue.
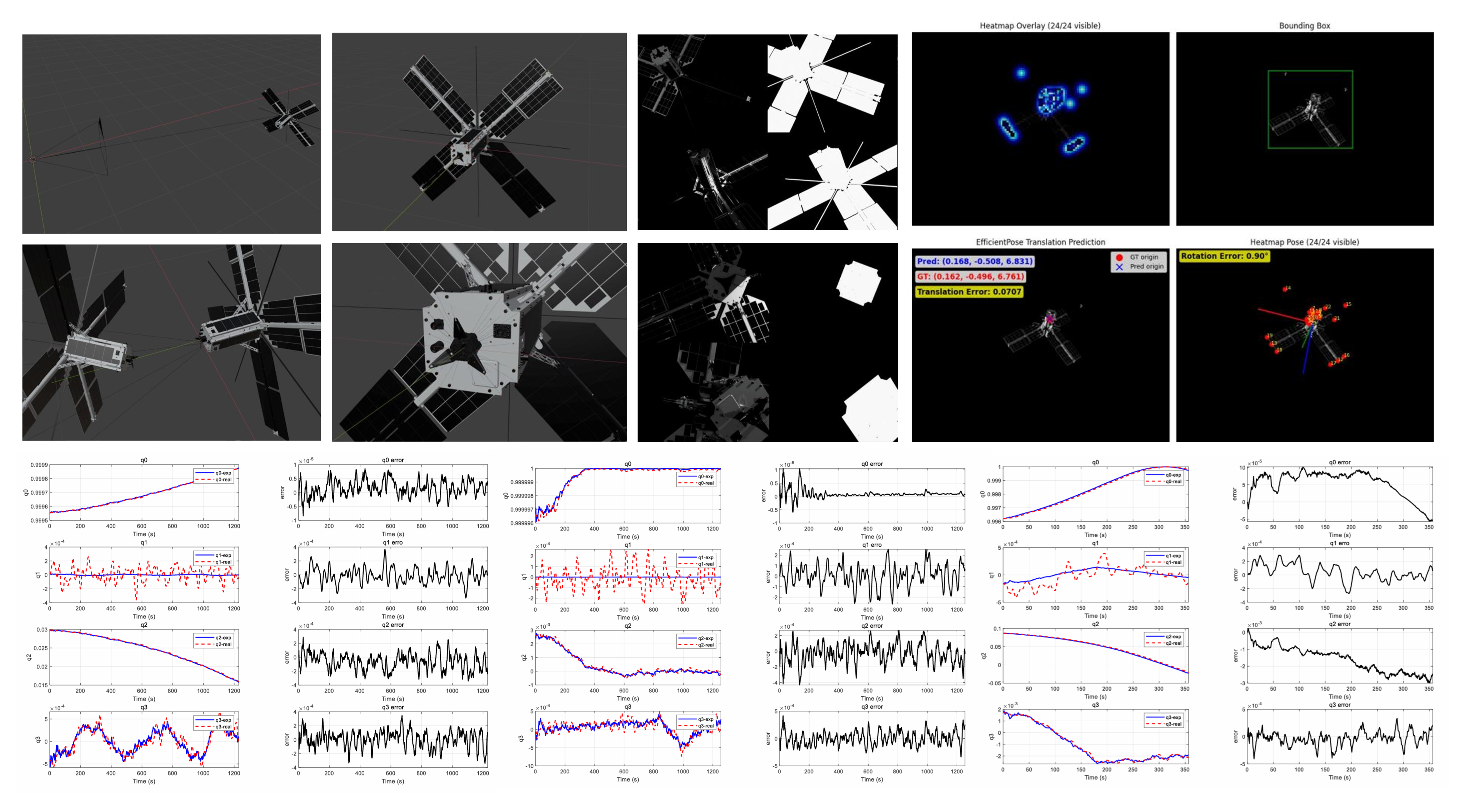
- For out-of-frame keypoints, occlusion, and scarce on-orbit data in close rendezvous, extended SPNv2 multi-task 6-DoF estimation (EfficientDet-B3+BiFPN, visibility-aware losses), led two-stage synthetic datasets (100k+ samples) for 1–10 m approach and 0.1–1 m docking, and deployed TensorRT on Jetson Orin NX (~35 ms/frame).
- For nonlinear rendezvous and propellant trade-offs, built MEE dynamics with CKF LiDAR–vision fusion and PMP guidance over 100 m–0.02 m (62.88% fuel savings, ≤5 mm terminal error); distributed 6-DoF control achieved ≤1 s high–low thrust switching with >0.0148 m docking accuracy under ±30% perturbation.
- For 180° phase-difference rendezvous at 400 km LEO, established MEE dynamics and unified comparisons of three water-propulsion strategies with ±5% thrust ripple via PID switching and Lambert/PMP solves; combined thrust saved 73.1% fuel vs. pure high thrust and cut mission time 12.5% (84 h) vs. fuel-optimal low thrust.
- For missing repeatable electrospray bench workflows, supported Arduino HV scanning, plume filtering/slope analysis, and Einzel-lens simulations compressing divergence from 20° to within 12°, backing multiple propulsion invention patents (array thruster, RPA, ground current measurement).
Research outputs
-
Low-Cost Versatile On-Orbit Servicing CubeSat with Refuellable Multimodal Water-Propellant Propulsion System
2026 · Accepted · International Astronautical Congress (IAC 2026) · Accepted
-
Orbital Maneuver Study of High-Low Thrust Combined Multimodal Water Propulsion for On-Orbit Servicing
2026 · Accepted · International Conference on Guidance, Navigation and Control (ICGNC 2026) · Springer LNEE proceedings (EI Compendex) · Accepted
-
Preliminary Design of GNC System and Multi-mode Propulsion Cooperative Control for Micro-Nano Satellite Autonomous Rendezvous and Docking
2026 · Under Review · 6th China Conference on Space Security (CASS) · Under Review
-
一种百尖端阵列式多孔电喷雾微推力器 Hundred-Tip Array Multi-Orifice Electrospray Micro-Thruster
2026 · Chinese invention patent · Under Internal Review
-
一种用于电推进羽流特性表征的阻滞电势分析系统及测量方法 Retarding-Potential Analyzer System and Method for Electric-Propulsion Plume Characterization
2026 · Chinese invention patent · Under Internal Review
-
一种基于双附加电极与 Einzel 透镜的电喷雾推力器羽流角静电控制方法 Electrostatic Plume-Angle Control for Electrospray Thrusters Using Dual Guard Electrodes and an Einzel Lens
2026 · Chinese invention patent · Under Internal Review
-
一种用于地面测试的电喷雾推力器多维度电流自动测量系统 Automated Multi-Dimensional Current Measurement System for Electrospray Thrusters in Ground Testing
2026 · Chinese invention patent · Under Internal Review
Stack
Python, PyTorch, TensorRT, MATLAB/Simulink, Jetson Orin NX