
AI摆摊:在 muShanghai × 观猹 AI 练摊集市的一次高密度体验
作者参加 muShanghai × 观猹 联合举办的 AI 练摊集市,按推荐指数盘点现场体验过的十余个项目,包括 Star CoPlay(星露谷 AI 联机搭子)、NeonLingo(浏览器无痛学英语)、Ordine 多 Agent 工作流编排、谱乐 AI 音乐创作、FaSkill 融资顾问 Agent、Sonicite 场景化声音系统等,并附官网链接与个人评价。
Alongside coursework I independently publish on CSDN and CNBlogs as ChenAI-TGF, with official recognition including CSDN AI Rising Star creator, Blog Star Top 300, and Alibaba Cloud Developer Community Star Blogger. 140+ technical articles across domains: 290k+ views platform-wide, 4k+ saves, and 3.3k+ code-snippet copies.
作者参加 muShanghai × 观猹 联合举办的 AI 练摊集市,按推荐指数盘点现场体验过的十余个项目,包括 Star CoPlay(星露谷 AI 联机搭子)、NeonLingo(浏览器无痛学英语)、Ordine 多 Agent 工作流编排、谱乐 AI 音乐创作、FaSkill 融资顾问 Agent、Sonicite 场景化声音系统等,并附官网链接与个人评价。
作者參加 muShanghai × 觀猹 聯合舉辦的 AI 練攤集市,按推薦指數盤點現場體驗過的十餘個專案,包括 Star CoPlay(星露谷 AI 連線搭子)、NeonLingo(瀏覽器無痛學英語)、Ordine 多 Agent 工作流編排、諧樂 AI 音樂創作、FaSkill 融資顧問 Agent、Sonicite 場景化聲音系統等,並附官網連結與個人評價。
A field report from the muShanghai × Guancha AI practice market, ranking 10+ booths the author actually tried—from Star CoPlay (Stardew Valley AI co-op) and NeonLingo (browser-based English learning) to Ordine (multi-agent workflows), Yuele AI music, FaSkill fundraising agent, and Sonicite scene-aware sound—with links and star ratings.
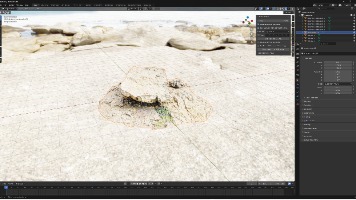
blender-mcp插件全流程:安装uv/uvx、Blender安装addon、Cursor配置MCP、双向连接测试,实现自然语言驱动Blender建模/材质/渲染,附排错与Prompt示例。
blender-mcp外掛全流程:安裝uv/uvx、Blender安裝addon、Cursor配置MCP、雙向連線測試,實現自然語言驅動Blender建模/材質/渲染,附排錯與Prompt範例。
Full blender-mcp setup: uv, Blender addon, Cursor MCP config, connectivity test—control Blender 3D creation via natural language with troubleshooting tips.
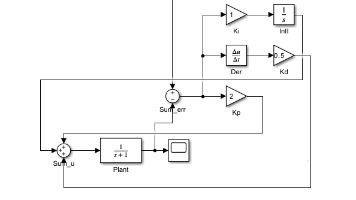
本文整理自一次真实的 Windows 环境配置过程,面向已安装 MATLAB / Simulink 与 Python,希望在 Cursor或者其他Agent 里通过 Model Context Protocol (MCP) 让 AI 直接操作 Simulink 模型的读者。
本文整理自一次真實的 Windows 環境配置過程,面向已安裝 MATLAB / Simulink 與 Python,希望在 Cursor或者其他Agent 裡通過 Model Context Protocol (MCP) 讓 AI 直接操作 Simulink 模型的讀者。
This Windows walkthrough installs the community simulink‑mcp server so agents such as Cursor can invoke roughly fourteen MCP tools—load/save/list models, add or rewire blocks, tweak solver flags, tweak parameters, and launch simulations returning figures or numerical traces—without hand‑dragging every block. Prerequisites include MATLAB’s Python engine matching a supported interpreter, Python ≥ 3.10 for Anthropic’s mcp CLI, and patience with MATLAB lazy start (~15‑20 s cold).
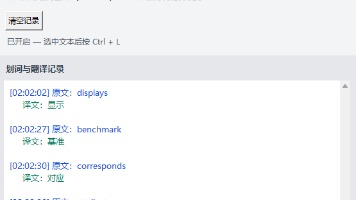
介绍开源划词工具 SnapTranslate:选中文字按 Ctrl+L 即可翻译,支持悬浮窗与日志,基于 Tkinter、全局热键、剪贴板抓取与 Google 翻译接口。
介紹開源劃詞工具 SnapTranslate:選取文字按 Ctrl+L 即可翻譯,支援懸浮窗與日誌,基於 Tkinter、全域熱鍵、剪貼簿擷取與 Google 翻譯介面。
SnapTranslate open-source guide: select text + Ctrl+L, popup and log UI, built with Tkinter, global hotkeys, clipboard capture, and Google Translate API.
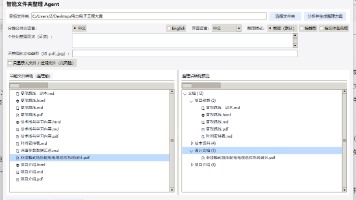
介绍基于 DeepSeek 的开源 FolderFox:多模式 AI 整理、可视化预览拖拽、风险文件标记与可撤销执行,并解析感知-决策-执行-反馈的 Agent 架构。
介紹基於 DeepSeek 的開源 FolderFox:多模式 AI 整理、可視化預覽拖拽、風險檔案標記與可撤銷執行,並解析感知-決策-執行-反饋的 Agent 架構。
FolderFox uses DeepSeek for smart file organization with preview, drag edits, safety flags, undo, and a four-layer agent design—open source on GitHub.
三维重建工程化全景:从输入模态与场景定义、数据质控、标定位姿、深度多视图、稠密表示到语义增强与部署优化,梳理深度学习各阶段可落地切入点。
三維重建工程化全景:從輸入模態與場景定義、資料質控、標定位姿、深度多視圖、稠密表示到語義增強與部署優化,梳理深度學習各階段可落地切入點。
Engineering-oriented 3D reconstruction pipeline: task definition, data QC, pose/calibration, depth, dense models, semantics, and deployment—with DL touchpoints.

SnapTranslate 3.0 是基于 Python 的本地英语学习工具集,提供全局划词与截图 OCR 翻译、一键收录生词到 vocab.json、桌面与 Streamlit Web 双端复习,以及 DeepSeek AI 批量补全例句和后台管理功能。文章介绍四大模块、安装启动步骤与适用场景,强调数据本地存储、无广告与开源免费。
SnapTranslate 3.0 是基於 Python 的本地英語學習工具集,提供全局劃詞與截圖 OCR 翻譯、一鍵收錄生詞到 vocab.json、桌面與 Streamlit Web 雙端複習,以及 DeepSeek AI 批量補全例句和後臺管理功能。文章介紹四大模塊、安裝啟動步驟與適用場景,強調數據本地存儲、無廣告與開源免費。
SnapTranslate 3.0 is built around English learning scenarios, with four core modules covering translation, accumulation, review, and management end to end: 1. Global selection translation + screenshot OCR translation: Works across all desktop software; shortcuts deliver results in seconds

Clawdbot/Moltbot Windows 本地 AI 助手部署:Node.js v22+、PowerShell 脚本权限、一键安装、onboard 配置 Qwen/OpenAI、Token 网关授权与技能扩展要点。
Clawdbot/Moltbot Windows 本地 AI 助手部署:Node.js v22+、PowerShell 腳本權限、一鍵安裝、onboard 配置 Qwen/OpenAI、Token 網關授權與技能擴展要點。
Clawdbot/Moltbot on Windows: Node v22+, execution policy, install script, onboarding, gateway token auth, and local agent skills overview.

第一部分:The Vision —— 当神秘学的仪式感,撞上数字时代的代码 它的灵魂,藏在洗牌时指尖的触感、切牌时专注的呼吸、抽牌时心跳的停顿里——这一整套完整的仪式,本质是让你从浮躁的日常里抽离,沉下心来直面自己的困惑;而 78 张阿卡纳牌的符号,不过是你内心潜意识的投射载体。
第一部分:The Vision —— 當神秘學的儀式感,撞上數字時代的代碼 它的靈魂,藏在洗牌時指尖的觸感、切牌時專注的呼吸、抽牌時心跳的停頓裡——這一整套完整的儀式,本質是讓你從浮躁的日常裡抽離,沉下心來直面自己的困惑;而 78 張阿卡納牌的符號,不過是你內心潛意識的投射載體。
cd mystic-vision-tarot cd mystic-vision-tarot VITE v6.x ready in xxx ms
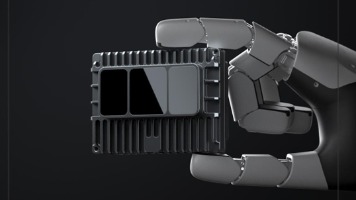
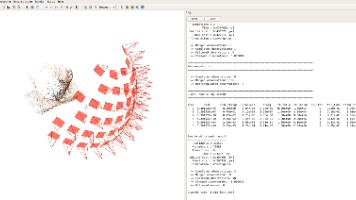
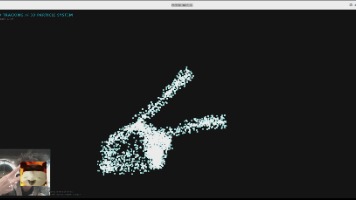
RoboSense E1R Windows 连接教程:接口盒接线、电脑 IP 设为 192.168.1.102、关闭防火墙、用 RSView 打开 RS-E1 点云,并附 Ping 通但无画面等排错要点。
RoboSense E1R Windows 連線教學:介面盒接線、電腦 IP 設為 192.168.1.102、關閉防火牆、用 RSView 開啟 RS-E1 點雲,並附 Ping 通但無畫面等排錯要點。
RoboSense E1R on Windows: wiring, set PC to 192.168.1.102, disable firewall, open RS-E1 stream in RSView, plus fixes when ping works but no point cloud.

开源 Tkinter 表格工具:双表比对(可不同列名)、多行合并整理,openpyxl 读写保留 Excel 嵌入图片,多线程进度条。
開源 Tkinter 表格工具:雙表比對(可不同列名)、多行合併整理,openpyxl 讀寫保留 Excel 嵌入圖片,多線程進度條。
Open Tkinter Excel tool: sheet compare with image preserve, multi-row merge by key column, openpyxl export, threaded progress UI.

拆解通义千问“30亿送奶茶”活动:一句话点单的技术链路、峰值80万QPS导致的三层崩溃瓶颈,以及阿里生态+算力壁垒;探讨AI Agent从“能办事”到“办好事”的进化方向。
拆解通義千問「30億送奶茶」活動:一句話點單的技術鏈路、峰值80萬QPS導致的三層崩潰瓶頸,以及阿里生態+算力壁壘;探討AI Agent從「能辦事」到「辦好事」的進化方向。
Analysis of Qwen’s viral milk-tea AI order campaign: tech stack, 800k QPS crash bottlenecks, Alibaba’s moat, and how agents must evolve from “can act” to “act well.”

解读 2026 春晚四家国人形机器人企业(宇树、魔法原子、松延动力、银河通用)的节目亮点、全栈技术、集群/仿生/具身大模型原理及与海外对比与产业化路线。
解讀 2026 春晚四家國人形機器人企業(宇樹、魔法原子、松延動力、銀河通用)的節目亮點、全棧技術、集群/仿生/具身大模型原理及與海外對比與產業化路線。
2026 Spring Festival Gala review of four Chinese humanoid makers—Unitree, MagicLab, Noetix, Galbot—performances, tech stacks, swarm/bionic/embodied AI, vs global peers and commercialization.

GPU 部署阿里 Jimeng 中文文生图:ModelScope 加载 damo 模型,用 huggingface_hub 补丁解决 cached_download 兼容问题,含单次测试与交互脚本及 OOM 等 FAQ。
GPU 部署阿里 Jimeng 中文文生圖:ModelScope 載入 damo 模型,以 huggingface_hub 補丁解決 cached_download 相容問題,含單次測試與互動腳本及 OOM 等 FAQ。
Deploy Jimeng Chinese T2I on GPU via ModelScope, runtime Hub patch for cached_download, test and interactive scripts, plus OOM and output-key FAQs.

本文为睿尔曼第三代机械臂配套夹爪的入门实战:基于官方 Python SDK 讲解连接、movej 到位姿、rm_set_gripper_pick_on 力控抓取与 rm_set_gripper_release 释放等核心 API,并给出完整 main 流程与硬件/网络/示教器排查要点。读者可据此完成“运动—抓取—搬运—释放—复位”的闭环实验并处理无动作、掉件等常见问题。
本文為睿爾曼第三代機械臂配套夾爪的入門實戰:基於官方 Python SDK 講解連接、movej 到位姿、rm_set_gripper_pick_on 力控抓取與 rm_set_gripper_release 釋放等核心 API,並給出完整 main 流程與硬件/網絡/示教器排查要點。讀者可據此完成“運動—抓取—搬運—釋放—復位”的閉環實驗並處理無動作、掉件等常見問題。
In the previous post we covered basic motion for the third-generation Realman arm. The gripper is what turns “motion” into useful work—pick, place, hand-off. Compared with traditional industrial grippers that need separate pneumatic/electric commissioning, Realman’s gripper is driven through a mature Python SDK: no extra wiring or low-level drivers—call a few APIs to grasp and release.

本篇介绍如何通过预编译安装包部署小红书 MCP(xiaohongshu-mcp),完成登录、启动服务、用 MCP Inspector 验证,以及在 Cursor 的 .cursor/mcp.json 中接入 Streamable HTTP,从而用自然语言实现图文/视频发布与互动。文末包含常见连接与路径问题排查与合规使用提示。
本文說明如何用預編譯安裝包部署小紅書 MCP:執行登入工具取得 cookies、啟動服務、以 MCP Inspector 驗證,並在 Cursor 的 .cursor/mcp.json 設定 Streamable HTTP,透過自然語言發布圖文/影片與互動,另附常見連線與路徑問題與合規提醒。
This article walks through deploying Xiaohongshu MCP from prebuilt zips: login tool → cookies, starting the server on port 18060, verifying with the MCP Inspector over Streamable HTTP, and wiring http://localhost:18060/mcp into Cursor’s MCP config for natural-language posting and automation, plus troubleshooting and usage notes.
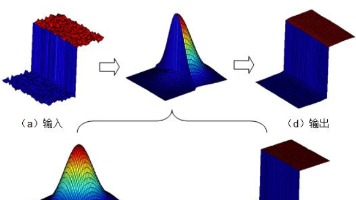
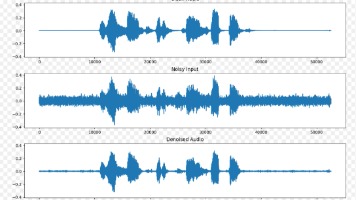
文章围绕深度图与点云去噪给出可运行方案:先用 OpenCV 对 uint16 深度图做双边滤波以保边平滑,再按相机内参转为点云,并用 Open3D 做统计滤波与半径滤波剔除孤立点与小簇噪点。文中包含 PLY 一键去噪、点云双边平滑及“深度滤波→点云→滤波”工业流程代码与参数调优要点。
文章圍繞深度圖與點雲去噪給出可運行方案:先用 OpenCV 對 uint16 深度圖做雙邊濾波以保邊平滑,再按相機內參轉為點雲,並用 Open3D 做統計濾波與半徑濾波剔除孤立點與小簇噪點。文中包含 PLY 一鍵去噪、點雲雙邊平滑及“深度濾波→點雲→濾波”工業流程代碼與參數調優要點。
Depth cameras (RealSense, Kinect, LiDAR) always inject noise—salt-and-pepper speckles, isolated outliers, sparse clutter, Gaussian-ish ripple. That noise hurts 3D reconstruction, registration, segmentation.
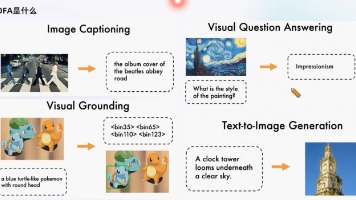
本文为 ModelScope 英文 OFA VQA 模型 iic/ofa_visual-question-answering_pretrain_large_en 的 Linux(Miniconda)部署全流程:覆盖清华镜像、transformers/tokenizers/huggingface-hub 固定版本组合,以及通过环境变量禁用 ModelScope 自动改依赖的关键步骤。文中给出可直接运行的 test.py(本地图或 HTTPS URL + 英文问题,输入为元组格式),并整理了依赖冲突、403 测试图、trust_remote_code、tuple 输入与各类告警等常见问题对照表。
本文為 ModelScope 英文 OFA VQA 模型 iic/ofa_visual-question-answering_pretrain_large_en 的 Linux(Miniconda)部署全流程:覆蓋清華鏡像、transformers/tokenizers/huggingface-hub 固定版本組合,以及通過環境變量禁用 ModelScope 自動改依賴的關鍵步驟。文中給出可直接運行的 test.py(本地圖或 HTTPS URL + 英文問題,輸入為元組格式),並整理了依賴衝突、403 測試圖、trust_remote_code、tuple 輸入與各類告警等常見問題對照表。
Hi everyone — I recently deployed the OFA VQA model and hit countless pitfalls around dependency versions, input formats, and permissions; it took a long time before inference produced correct answers. To save you the same pain, here is a fully reproducible walkthrough from environment prep through running scripts. Each step calls out details, and every pitfall includes symptom → cause → fix so newcomers can follow confidently.

介绍自研 Python/Tkinter 工具 SSH Turbo File Transfer:多线程 SFTP 并行传输、实时网速、SSH 命令自动解析与远程浏览下载,附 GitHub 克隆与运行步骤。
介紹自研 Python/Tkinter 工具 SSH Turbo File Transfer:多執行緒 SFTP 並行傳輸、即時網速、SSH 命令自動解析與遠端瀏覽下載,附 GitHub 克隆與運行步驟。
Overview of the open-source SSH Turbo File Transfer desktop tool: multi-threaded SFTP, live throughput, SSH command parsing, remote file browser, and quick start from GitHub.

本文介绍开源 desktop 应用 PhotoLab Pro:以 PyQt6+OpenCV+Pillow 实现单窗口五大模块(交互编辑、拼图、JPEG 批量压缩、图片转 PDF、高级批处理/宏)。文章说明各模块能力与快捷键体系,并给出克隆仓库、虚拟环境与运行 main.py 的步骤,以及后续 AI 功能与跨端规划。
本文介紹開源 desktop 應用 PhotoLab Pro:以 PyQt6+OpenCV+Pillow 實現單窗口五大模塊(交互編輯、拼圖、JPEG 批量壓縮、圖片轉 PDF、高級批處理/宏)。文章說明各模塊能力與快捷鍵體系,並給出克隆倉庫、虛擬環境與運行 main.py 的步驟,以及後續 AI 功能與跨端規劃。
Everyday imaging tasks keep bumping into the same walls: JPEG compressors billed per file; collages watermarked unless you subscribe; PDF export either single-file only or buried in a paid tier; light edits forcing giant proprietary suites… and jumping between apps loses time and provenance. PhotoLab Pro—built with PyQt6, OpenCV, Pillow—targets that fragmentation.
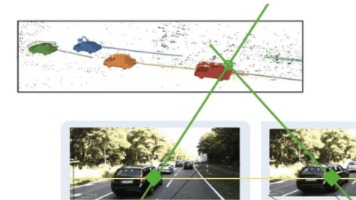
从2D影像恢复三维几何的全景科普:被动视觉(单目SfM、双目立体、NeRF、3D高斯泼溅)与主动视觉(结构光、ToF),涵盖原理、流程、适用场景与主要瓶颈,并附核心文献索引。
在人工智慧的浪潮中,如果說傳統的2D影象識別是讓機器“認出”物體,那麼3D重建(3D Reconstruction)則是讓機器真正“理解”物理世界。透過機器視覺實現3D重建,是賦予機器人、無人機和自動駕駛汽車空間感知能力的核心技術。
A panoramic, practitioner-friendly survey of 3D reconstruction from images: passive methods (monocular SfM, stereo/disparity, NeRF, 3D Gaussian Splatting) vs. active sensing (structured light, ToF), with pipelines, trade-offs, real-world uses, open challenges, and key references.
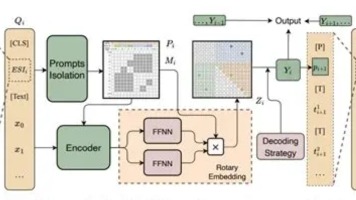
5 分钟部署 RexUniNLU:用 ModelScope 加载 Siamese-UIE,仅需 Schema 标签即可零样本抽取意图与实体,含多场景示例与 FastAPI 封装及避坑说明。
5 分鐘部署 RexUniNLU:用 ModelScope 載入 Siamese-UIE,僅需 Schema 標籤即可零樣本抽取意圖與實體,含多場景範例與 FastAPI 封裝及避坑說明。
Deploy RexUniNLU in minutes via ModelScope Siamese-UIE—schema-only zero-shot intent/entity extraction, multi-scenario demos, FastAPI wrapper, and practical tips.
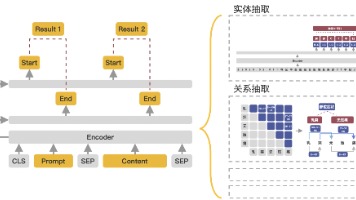
本文面向系统盘≤50G、PyTorch 版本不便升级的云端实例,演示 SiameseUIE(StructBERT 系列)从 aria2 下载权重到本地加载的全流程:在不额外 pip 的前提下,通过伪造 transformers 图像/检测相关子模块绕过可选依赖冲突,并用 BertTokenizer + BertModel.from_pretrained(..., local_files_only=True) 读取模型。后半部分给出基于词典匹配的「人物/地点」可读抽取示例及五组批量场景测试;附录列出 vocab.txt、pytorch_model.bin、config.json 与 test.py 等必备文件清单。
本文面向系統盤≤50G、PyTorch 版本不便升級的雲端實例,演示 SiameseUIE(StructBERT 系列)從 aria2 下載權重到本地加載的全流程:在不額外 pip 的前提下,通過偽造 transformers 圖像/檢測相關子模塊繞過可選依賴衝突,並用 BertTokenizer + BertModel.from_pretrained(..., local_files_only=True) 讀取模型。後半部分給出基於詞典匹配的「人物/地點」可讀抽取示例及五組批量場景測試;附錄列出 vocab.txt、pytorch_model.bin、config.json 與 test.py 等必備文件清單。
OS;Linux (Ubuntu-class);Demo baseline;Python env;torch28;Bundled transformers expected;Disk budget;≤50 GB guardrail;Cache routed to /tmp; mmap mindset

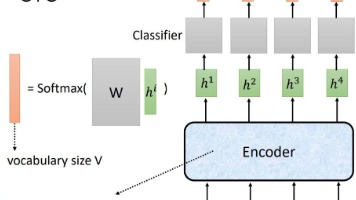
零基础部署 bert-base-chinese:安装 PyTorch/Transformers,运行完形填空、语义相似度与词向量三个示例,并总结客服、搜索、舆情等工业场景。
零基礎部署 bert-base-chinese:安裝 PyTorch/Transformers,執行完形填空、語義相似度與詞向量三個範例,並總結客服、搜尋、輿情等工業場景。
Deploy bert-base-chinese with PyTorch/Transformers: fill-mask, similarity, and embedding demos plus industry use cases from search to moderation.

五分钟部署 RAG 双模型:GTE-Chinese-Large 做语义检索、SeqGPT-560m 做生成;含依赖安装、aria2 加速下载、Transformers 加载避坑与示例脚本。
五分鐘部署 RAG 雙模型:GTE-Chinese-Large 做語義檢索、SeqGPT-560m 做生成;含依賴安裝、aria2 加速下載、Transformers 加載避坑與示例腳本。
ModelScope NLP models need many deps. Install once to avoid whack-a-mole errors: pip install modelscope -U
文章讲解如何在 Linux 上部署阿里 iic 的 speech_charctc_kws_phone-xiaoyun 唤醒模型:锁定 modelscope、datasets、funasr 版本避免冲突,用 snapshot_download 拉取权重,并通过 Monkey Patch 修复 FunASR 1.3.1 的 writer 属性 Bug。同时强调 16kHz 单声道 WAV 输入要求及 FFmpeg 转码方法,给出完整 test_kws.py 推理示例。
文章講解如何在 Linux 上部署阿里 iic 的 speech_charctc_kws_phone-xiaoyun 喚醒模型:鎖定 modelscope、datasets、funasr 版本避免衝突,用 snapshot_download 拉取權重,並通過 Monkey Patch 修復 FunASR 1.3.1 的 writer 屬性 Bug。同時強調 16kHz 單聲道 WAV 輸入要求及 FFmpeg 轉碼方法,給出完整 test_kws.py 推理示例。
GPU: NVIDIA GeForce RTX 4090 D (24GB) Python: 3.11 + PyTorch 2.6.0
三分钟部署阿里达摩院FRCRN 16k单麦降噪:ModelScope pipeline快速验证,FastAPI封装Web API,强调采样率16k、GPU/CPU与长音频分片等避坑要点。
三分鐘部署阿里達摩院FRCRN 16k單麥降噪:ModelScope pipeline快速驗證,FastAPI封裝Web API,強調採樣率16k、GPU/CPU與長音訊分片等避坑要點。
Deploy Alibaba FRCRN 16 kHz denoising via ModelScope and FastAPI in minutes—sampling rate, device choice, and chunking tips included.

本文给出在 24GB 显存单卡上部署 Flux.1-dev 并加载 360° 驾驶舱 LoRA 的完整流程:先安装 diffusers/transformers/peft 等依赖,完成 Hugging Face 授权与 CLI 登录,再用 ModelScope 国内镜像下载底模与 LoRA。推理脚本通过 enable_sequential_cpu_offload 与显存优化规避 OOM,并总结了常见报错与处理方式。
本文給出在 24GB 顯存單卡上部署 Flux.1-dev 並加載 360° 駕駛艙 LoRA 的完整流程:先安裝 diffusers/transformers/peft 等依賴,完成 Hugging Face 授權與 CLI 登錄,再用 ModelScope 國內鏡像下載底模與 LoRA。推理腳本通過 enable_sequential_cpu_offload 與顯存優化規避 OOM,並總結了常見報錯與處理方式。
Flux.1-dev is among the strongest open text-to-image models, but 24GB+ parameters make 24GB VRAM (e.g. 3090/4090) setups crash easily. This guide distills real troubleshooting: ModelScope fast download, automatic auth, and sequential CPU offload for a stable single-GPU workflow.

随着AI技术的普及,Google AI Studio中的Gemini模型成为不少开发者和创作者的常用工具。但很多用户在访问时会遇到一个棘手问题——无法成功进入平台,页面仅显示“Google AI Studio 和 Gemini API 的可用区域”列表,导致无法正常使用服务。这种情况并非单一原因导致,我结合自身排查经历和大量用户反馈,整理出三种核心场景及对应的全方位解决方法,帮你快速突破访问障碍。
隨著AI技術的普及,Google AI Studio中的Gemini模型成為不少開發者和創作者的常用工具。但很多用戶在訪問時會遇到一個棘手問題——無法成功進入平臺,頁面僅顯示“Google AI Studio 和 Gemini API 的可用區域”列表,導致無法正常使用服務。這種情況並非單一原因導致,我結合自身排查經歷和大量用戶反饋,整理出三種核心場景及對應的全方位解決方法,幫你快速突破訪問障礙。
Crawl time (ISO local): 2026-05-18 05:17:29 With the popularity of AI technology, the Gemini model in Google AI Studio has become a common tool for many developers and creators.But many users encounter a tricky issue when accessing the platform - they can't successfully access the platform, an

面向希望在本机可用的读者,从零梳理 ChatGLM2-6B 的硬件/显存要求、环境与依赖、权重下载、推理自检与最简单的流式对话 Demo,并顺带整理常见问题与轻量化思路。
从零整理在本機可用的 ChatGLM2-6B:硬體與視訊記憶體評估、環境與套件、權重下載、推理自檢以及最精簡的串流對話程式,並附上常見錯誤與縮載技巧。
A from-zero local deployment walkthrough for THU ChatGLM2-6B: GPU/RAM expectations, environment setup, weight download, a minimal inference sanity check and streaming CLI demo, plus common pitfalls.

本文指导在 16GB 级显存环境下部署 3.5B 动漫生成模型 NewBie-image-Exp0.1:安装依赖与受限网络下的 wget/本地 pip、从 Hugging Face 拉取权重、用脚本修补 model.py 的索引与拼接维度问题,并给出独立推理与交互式生成示例及 dtype/XML/batch 等坑点总结。
本文指導在 16GB 級顯存環境下部署 3.5B 動漫生成模型 NewBie-image-Exp0.1:安裝依賴與受限網絡下的 wget/本地 pip、從 Hugging Face 拉取權重、用腳本修補 model.py 的索引與拼接維度問題,並給出獨立推理與交互式生成示例及 dtype/XML/batch 等坑點總結。
NewBie-image-Exp0.1 is a 3.5B anime image generation model built on the Next‑DiT architecture. It supports XML‑structured prompts and excels at multi‑character control and attribute binding. Deploying NewBie-image-Exp0.1 is challenging because it combines several top-tier components (Gemma 3, Jina CLIP, Flux VAE), and the reference code has hard bugs

介绍开源 Python PDF 手写模拟器:tkinter + PyMuPDF 框选区域、中英文分参、抖动模拟真实笔迹,支持模板复用,用于实验报告等手写 PDF 填充。
介紹開源 Python PDF 手寫模擬器:tkinter + PyMuPDF 框選區域、中英文分參、抖動模擬真實筆跡,支持模板複用,用於實驗報告等手寫 PDF 填充。
Students know the pain of copying lab reports by hand. This Python PDF handwriting simulator fills selected PDF regions with realistic handwriting — separate Chinese/English settings, jitter controls, reusable JSON templates.
讲解 RAG 粗排+精排流程与 Bi/Cross-Encoder 差异,给出 BGE-Reranker-v2-m3 安装部署代码及“猫能喝牛奶吗”演示,说明重排序如何过滤关键词陷阱。
講解 RAG 粗排+精排流程與 Bi/Cross-Encoder 差異,給出 BGE-Reranker-v2-m3 安裝部署程式及「貓能喝牛奶嗎」示範,說明重排序如何過濾關鍵詞陷阱。
Explains coarse vs fine retrieval in RAG, why embeddings miss nuance, and how to plug in BGE-Reranker-v2-m3—a lightweight multilingual cross-encoder—for practical reranking after vector search.

三分钟部署 thenlper/gte-base-zh:环境依赖、编码测试、余弦相似度语义检索示例,以及 FastAPI 向量化 API 与部署优化建议。
三分鐘部署 thenlper/gte-base-zh:環境依賴、編碼測試、餘弦相似度語義檢索示例,以及 FastAPI 向量化 API 與部署優化建議。
GTE (General Text Embedding) is a text-embedding family from Alibaba DAMO / Tongyi Lab.On C-MTEB (Chinese MTEB), GTE models routinely rank near the top.GTE-Base-ZH traits: Balanced: Base size hits a sweet spot between cost and recall.

教程在已具备 PyTorch/CUDA 的 Linux 上部署 GLM-4V-9B:列出依赖与 ModelScope 下载、给出与源码一致的 inference 推理脚本(含 BF16、apply_chat_template),并简述 4-bit 量化与 vLLM OpenAI 式服务。
教程在已具備 PyTorch/CUDA 的 Linux 上部署 GLM-4V-9B:列出依賴與 ModelScope 下載、給出與源碼一致的 inference 推理腳本(含 BF16、apply_chat_template),並簡述 4-bit 量化與 vLLM OpenAI 式服務。
GLM-4V-9B from Zhipu AI is a recent open vision-language model emphasizing image understanding + dialogue + reasoning. Self-hosting keeps data on-prem and slashes long‑term API invoices versus cloud SKUs. This guide targets Linux boxes that already satisfy PyTorch + CUDA prerequisites and demonstrates end-to-end local inference. ---

开源 Python GUI 工具 SysNetMonitor:实时监控进程网速与端口占用,提供网络环境、Ping/测速/路由追踪、带宽限制与 CSV/图表导出,适合 Windows 排障。
開源 Python GUI 工具 SysNetMonitor:實時監控進程網速與端口占用,提供網絡環境、Ping/測速/路由追蹤、帶寬限制與 CSV/圖表導出,適合 Windows 排障。
Ever wonder why the network slows down, which process eats bandwidth, or what owns a port? This Process & Network Monitor (Python + GUI) tracks traffic, analyzes per-process behavior, diagnoses issues, and can cap bandwidth—zero learning curve. Open source on GitHub: Stars appreciated! You can also DM the author for the code. UI preview:

在 AI 时代,高质量的数据是模型训练的基石。而 PDF 文档由于其排版复杂(多栏、表格、公式、图片交叉),一直是数据清洗中的“硬骨头”。
在 AI 時代,高質量的數據是模型訓練的基石。而 PDF 文檔由於其排版複雜(多欄、表格、公式、圖片交叉),一直是數據清洗中的“硬骨頭”。
OS: Ubuntu 22.04+ GPU: NVIDIA, 8 GB+ VRAM (12–16 GB ideal) Disk: 20 GB+ for weights
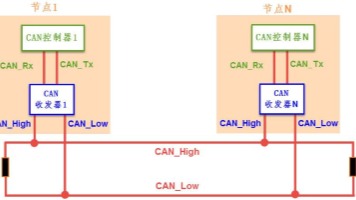
从 CAN 差分物理层、非破坏性仲裁、2.0A/2.0B 帧与错误状态机讲起,到 Linux SocketCAN/vcan 环境与 python-can 异步收发实战及 DBC/负载率最佳实践。
從 CAN 差分物理層、非破壞性仲裁、2.0A/2.0B 幀與錯誤狀態機講起,到 Linux SocketCAN/vcan 環境與 python-can 異步收發實戰及 DBC/負載率最佳實踐。
In autonomous driving, rail transit, and industrial automation, CAN (Controller Area Network) is the undisputed cornerstone of communications.Unlike Ethernet or serial interfaces, CAN is inherently designed for real-time behavior and high reliability.Its unique non-destructive arbitration mechanism and strong immunity to electromagnetic interference

解析 git clone SSH 报 Permission denied (publickey) 的原因,提供 HTTPS 临时克隆与 ed25519 SSH 密钥生成、添加 GitHub、ssh-agent 验证的完整根治步骤(以 detectron2 为例)。
解析 git clone SSH 報 Permission denied (publickey) 的原因,提供 HTTPS 臨時克隆與 ed25519 SSH 密鑰生成、添加 GitHub、ssh-agent 驗證的完整根治步驟(以 detectron2 為例)。
While deploying detectron2, I ran: text git clone git@github.com:facebookresearch/detectron2.git Error: text Cloning into 'detectron2'... git@github.com: Permission denied (publickey). fatal: Could not read from remote repository. Please make sure you have the correct access rights and the repository exists. The repo is public, so access rights were not the issue — SSH authentication failed. This post documents the fix.

深度解读Swin Transformer:分层特征图、移位窗口自注意力(SW-MSA)、相对位置偏置,对比ViT缺陷,覆盖分类/检测/分割实验与消融分析。
深度解讀Swin Transformer:分層特徵圖、移位視窗自注意力(SW-MSA)、相對位置偏置,對比ViT缺陷,涵蓋分類/檢測/分割實驗與消融分析。
Deep dive into Swin Transformer: hierarchical maps, shifted-window attention, vs ViT limits, with classification/detection/segmentation benchmarks.

解析睿尔曼开源手眼标定库:眼在手上/眼在手外原理、项目结构,以及 collect_data、compute_in_hand/to_hand、config.yaml 与 Tsai 标定流程。
解析睿爾曼開源手眼標定庫:眼在手上/眼在手外原理、項目結構,以及 collect_data、compute_in_hand/to_hand、config.yaml 與 Tsai 標定流程。
Hand-eye calibration maps camera and robot frames for grasping and visual servoing. After theory in the previous post, this article walks through RealMan’s open hand-eye calibration repo: layout, core modules, and usage.

Supertonic Python 版从 GitHub 克隆、解压、安装依赖到首次运行下载模型、修改 text 生成 WAV 的完整流程,附常见报错与预部署镜像说明。
Supertonic Python 版從 GitHub 克隆、解壓、安裝依賴到首次運行下載模型、修改 text 生成 WAV 的完整流程,附常見報錯與預部署鏡像說明。
Deploy once, reuse often. Comment if you need the mirror URL when it is published.

为零基础读者铺开手眼标定框架:厘清机器人、相机与各坐标变换,解释内外参含义,拆解 Eye‑in‑Hand 与 Eye‑to‑Hand 两种布线及 AX=XB 的由来,铺垫后续求解与实测。
從零說明手眼標定的座標層級:機械臂/相機之間的同構變換、內外參意義,以及 Eye-in-Hand 與 Eye-to-Hand 的典型佈線與 AX=XB 方程式由來,替後續求解打基礎。
Foundational hand-eye calibration reading: coordinate frames, homogeneous transforms, intrinsics/extrinsics, Eye-in-hand vs eye-to-world setups, and how AX=XB emerges before numeric solvers appear.

本文演示如何用 Gemini 3 与 Google AI Studio 的 Build 功能,通过结构化提示词一键生成「流体粒子 + 渐变流光」风格的粒子躲避小游戏,涵盖访问登录、提示词编写、代码生成调试,以及霓虹视觉、碰撞爆发、清屏光波与环形血条等完整玩法与效果展示。
本文演示如何用 Gemini 3 與 Google AI Studio 的 Build 功能,通過結構化提示詞一鍵生成「流體粒子 + 漸變流光」風格的粒子躲避小遊戲,涵蓋訪問登錄、提示詞編寫、代碼生成調試,以及霓虹視覺、碰撞爆發、清屏光波與環形血條等完整玩法與效果展示。
Gemini 3 is widely praised for code and creative apps. This post walks through Google AI Studio Build to generate a fluid particle dodge game from one structured prompt—covering login, prompt design, codegen, and neon visuals with collision bursts, radial clears, and ring health UI.

在计算机视觉(CV)领域的漫长发展中,卷积神经网络(CNN)凭借其固有的平移等变性和局部归纳偏置,长期占据绝对主导地位。从LeNet到ResNet,再到EfficientNet,CNN的网络结构迭代不断推动着视觉任务性能的突破。然而,2020年一款全新模型的出现,彻底打破了这一格局——它将自然语言处理(NLP)领域的Transformer架构直接引入视觉任务,在大规模数据支撑下实现了超越传统CNN的性能表现,它就是Vision Transformer(简称ViT)。ViT的诞生不仅打通了CV与NLP两大领域的技术壁垒,更开启了视觉模型发展的全新范式。
在計算機視覺(CV)領域的漫長發展中,卷積神經網絡(CNN)憑藉其固有的平移等變性和局部歸納偏置,長期佔據絕對主導地位。從LeNet到ResNet,再到EfficientNet,CNN的網絡結構迭代不斷推動著視覺任務性能的突破。然而,2020年一款全新模型的出現,徹底打破了這一格局——它將自然語言處理(NLP)領域的Transformer架構直接引入視覺任務,在大規模數據支撐下實現了超越傳統CNN的性能表現,它就是Vision Transformer(簡稱ViT)。ViT的誕生不僅打通了CV與NLP兩大領域的技術壁壘,更開啟了視覺模型發展的全新範式。
CNNs dominated CV for years—LeNet → ResNet → EfficientNet—thanks to translation equivariance and local inductive bias. In 2020, Vision Transformer (ViT) ported NLP’s Transformer to images; with enough data it beat CNNs and bridged CV/NLP. This post covers origin, mechanics, applications, variants, and outlook.

在日常办公和开发中,我们经常会遇到这样的需求:从大量PDF文件的指定区域提取文本(比如发票的日期、金额,报表的关键指标),或者对指定区域进行截图并汇总到Excel中。手动逐个处理效率极低,而通用的PDF OCR工具又无法精准定位区域。代码已开源在Github : 今天给大家分享一款我开发的Python工具——PDF区域OCR/截图逐个处理工具,它完美解决了上述痛点,支持手动审核+全自动批量处理,还内置了区域拖动缩放、Excel自动导出等实用功能,并且配备完善的UI界面,使用门槛极低。下面详细拆解它的功能和实现原理。
在日常辦公和開發中,我們經常會遇到這樣的需求:從大量PDF文件的指定區域提取文本(比如發票的日期、金額,報表的關鍵指標),或者對指定區域進行截圖並彙總到Excel中。手動逐個處理效率極低,而通用的PDF OCR工具又無法精準定位區域。代碼已開源在Github : 今天給大家分享一款我開發的Python工具——PDF區域OCR/截圖逐個處理工具,它完美解決了上述痛點,支持手動審核+全自動批量處理,還內置了區域拖動縮放、Excel自動導出等實用功能,並且配備完善的UI界面,使用門檻極低。下面詳細拆解它的功能和實現原理。
Region OCR;Box any area; Chinese + English; OpenCV preprocess (grayscale, adaptive threshold, morphology);Region screenshot;Save crops; UUID filenames; safe paths;Blue = OCR, green = screenshot, red = selected; drag edges, scale corner handle.

承接官方夹爪范例,本篇记录末端“能动臂、爪子完全不动”的完整排错链路:逐项核对脚本与示例、实测末端供电、还原官方范例缺的电压初始化,并追到示教器的通讯/波特配置。
接續官方夾爪例程,整理「機械臂會動但夾爪不動」的真實除錯路徑:軟體對照 SDK、電表量末端電壓,補上範例遺漏的輸出初始化,並回溯示教器通訊與 baud 設定問題。
Field report from Realman tooling: joints move yet the gripper stays idle—checking SDK snippets, metering end-effector rails, patching missing initialization calls, and fixing teach pendant comms baud settings.

零基础入门睿尔曼协作机械臂:从核心部件、底座与末端安装,到24V接线、开机指示灯含义,以及有线/无线示教器连接与拖动示教,覆盖RM65/RM75/RML63全系列首次上手指南。
零基礎入門睿爾曼協作機械臂:從核心部件、底座與末端安裝,到24V接線、開機指示燈、有線/無線示教器與拖動示教,涵蓋RM65/RM75/RML63全系列首次上手指南。
Beginner guide to RealMan collaborative arms: components, mounting, 24 V wiring, LED status, wired/wireless web teach pendant, and drag teaching for RM65/RM75/RML63.

系列第九篇精读《LLM.int8(): 8-bit Matrix Multiplication for Transformers at Scale》:为何朴素 int8 会伤精度、混合矩阵分解怎样做 outlier/channel 分拆、实验证明可在千亿参数规模上压低显存而不失稳。
系列第九篇精读《LLM.int8()》:說明大規模張量乘法在 int8 下為何失真、如何透過混合拆分處理 outlier 與通道縮放,並回顧作者在超大模型上對記憶體/精準度的量化實驗。
Deep dive into LLM.int8(): naive 8-bit GEMM outliers in hundred-billion-parameter stacks, structured mixed decomposition tricks, empirical memory wins without obvious quality regressions.

最近笔者在做一个开源项目分析的小工具,核心需求是通过Selenium自动化爬取Gitee平台上特定仓库的贡献者数据、提交记录等信息。这个爬虫脚本已经稳定运行了近一周,每天定时执行都能顺利获取数据。但就在前天,脚本突然彻底“罢工”——每次启动Selenium驱动Edge浏览器访问Gitee首页时,都会直接弹出“安全验证”提示框,无论等待多久都无法自动跳转,手动干预也无法正常进入网站,这让整个数据采集工作陷入停滞。当时弹出的验证界面有两个关键状态:第一个是初始的安全验证弹窗,提示“检测到您的访问可能存在安全风险,请完成验证”,界面中央只有一个“确认”按钮,点击后不会立即跳转,而是进入第二个提示界面,明确显示“当前环境正在被测试”,随后便陷入无限加载状态,无法进入Gitee的正常页面。
最近筆者在做一個開源項目分析的小工具,核心需求是通過Selenium自動化爬取Gitee平臺上特定倉庫的貢獻者數據、提交記錄等信息。這個爬蟲腳本已經穩定運行了近一週,每天定時執行都能順利獲取數據。但就在前天,腳本突然徹底“罷工”——每次啟動Selenium驅動Edge瀏覽器訪問Gitee首頁時,都會直接彈出“安全驗證”提示框,無論等待多久都無法自動跳轉,手動干預也無法正常進入網站,這讓整個數據採集工作陷入停滯。當時彈出的驗證界面有兩個關鍵狀態:第一個是初始的安全驗證彈窗,提示“檢測到您的訪問可能存在安全風險,請完成驗證”,界面中央只有一個“確認”按鈕,點擊後不會立即跳轉,而是進入第二個提示界面,明確顯示“當前環境正在被測試”,隨後便陷入無限加載狀態,無法進入Gitee的正常頁面。
I was building a Gitee analytics tool with Selenium (contributors, commits). It ran daily for a week, then failed: Edge opened Gitee and hit a security verification dialog—“possible risk, please verify.” Clicking Confirm led to “current environment is under test” and endless loading. Screenshots: Security verification dialog Environment under test warning I tried many anti-detection tricks; a manual browser visit unexpectedly fixed it. Full notes below.
通过一段「数字孪生手 + 粒子场」式的提示词链路,拆解 Gemini 3/Build:如何补齐摄像头权限、如何把骨架关键点映射到粒子材质,以及如何迭代演示里常见的性能与观感参数。
示範以 Gemini 3/Build 「一段提示詞」做出手勢驅動的 3D 粒子孿生 Demo:拆解鏡頭權限、骨架到粒子的對應,以及如何迭代特效與 FPS 的平衡。
Builds an interactive Gemini 3 particle-hand HUD: prompt layers for sensor permissions, keypoint shaders, iterative glow/budget sliders, capture-friendly presets.

系统梳理视觉大模型相对传统小模型的能力跃迁:数据与算力范式、代表性架构路线、在多模态与工业检测中的优劣,以及如何把它放进真实成本与 SLA 的工程评估。
統整視覺大模型對傳統小模型的能力躍昇:資料與算力敘事、代表架構、在製造檢測或多模態場景的定位,並提醒如何放回延遲、漂移與營運成本評估。
A strategic tour of foundation-scale vision models: training signals vs classical CV, strength/limit checklist for inspection or multimodal apps, and how teams should budget latency, drift and tooling.

详解Selenium控制Edge时“session not created”等报错:浏览器进程未关闭与WebDriver版本不匹配两大原因,提供手动更换msedgedriver与webdriver-manager自动匹配两种解决方案。
詳解Selenium控制Edge時「session not created」等報錯:瀏覽器進程未關閉與WebDriver版本不匹配兩大原因,提供手動更換msedgedriver與webdriver-manager自動匹配兩種方案。
Fixes Selenium Edge “session not created” errors from zombie browser processes or WebDriver version mismatch, with manual driver replacement and webdriver-manager auto-matching.

随着智能制造的普及,机械臂控制已成为机器人领域入门的核心技能。相比于传统工业机械臂复杂的调试流程和封闭的开发环境,睿尔曼第三代机械臂提供了简洁的Python SDK(软件开发工具包),无需深厚的底层控制知识,即可快速实现机械臂的运动控制。本文的核心目标是:以睿尔曼官方例程为蓝本,拆解机械臂控制的核心逻辑,让零基础读者理解“如何通过代码指挥机械臂运动”,并能动手完成基础的运动控制实操。无论你是高校学生、创客,还是刚接触机械臂的工程师,都能通过本文掌握睿尔曼第三代机械臂的基础控制方法。
隨著智能製造的普及,機械臂控制已成為機器人領域入門的核心技能。相比於傳統工業機械臂複雜的調試流程和封閉的開發環境,睿爾曼第三代機械臂提供了簡潔的Python SDK(軟件開發工具包),無需深厚的底層控制知識,即可快速實現機械臂的運動控制。本文的核心目標是:以睿爾曼官方例程為藍本,拆解機械臂控制的核心邏輯,讓零基礎讀者理解“如何通過代碼指揮機械臂運動”,並能動手完成基礎的運動控制實操。無論你是高校學生、創客,還是剛接觸機械臂的工程師,都能通過本文掌握睿爾曼第三代機械臂的基礎控制方法。
As smart manufacturing spreads, arm control is core robotics literacy. Unlike legacy industrial arms with heavy commissioning and closed stacks, Realman’s third-generation arms ship a straightforward Python SDK—you can command motion without deep low-level control theory. This post uses the official demo to unpack how code drives the arm, so beginners can run basic motion themselves. Students, makers, and new engineers can all learn third-gen Realman control here.

理论衔接实操:如何把开源求解器装进现有 Realman 控制栈,拆解标定数据采集、姿态覆盖、求解初值选择与失败回滚,以及如何把手眼矩阵写回运行时 TF 链路。
理論接上實務:將開源手眼解法嵌入睿爾曼控制流程,講資料蒐集、姿態涵蓋、數值發散時的排查與復原,並示範如何把手眼矩陣寫回運行期的座標發布鏈。
Hands-on sequel: wiring open-source AX=XB solvers into Realman pipelines—data rituals, posture coverage, numeric stability, recovering sane extrinsics, and publishing transforms back into the runtime graph.

从管理员命令行讲起:如何用 netstat 或 PowerShell 精准定位监听端口背后的 PID,再用 taskkill/任务管理器结束进程并用二次探测确认释放;文末整理拒绝访问、系统 PID、占用反复出现等特例。
以系統管理者 CLI 為主線:先用 netstat 或 PowerShell 找出占用埠的 PID,再以 taskkill 或「工作管理員」結束處理程序並複查監聽連接是否已釋放,並附上「拒絕存取」等特例解法。
Windows port triage playbook: escalate to admin shells, map LISTEN rows to owning PIDs, end them with taskkill or Task Manager, re-probe sockets, plus notes on access denied, PID 4, and phantom listeners.

当流水线上的机械臂精准完成第1000次焊接,当手术机器人辅助医生完成0.1毫米级的操作,当物流仓库的分拣臂每小时处理1200件包裹——这些场景都在诉说着机械臂作为"智能执行终端"的核心价值。作为集机械、电子、控制等多学科于一体的核心装备,机械臂已从简单的"替代人工"进化为"价值共创"的产业伙伴。今天,我们就全面拆解机械臂的技术内核与产业图景。- 前言 - [一、本质认知:机械臂是什么?
當流水線上的機械臂精準完成第1000次焊接,當手術機器人輔助醫生完成0.1毫米級的操作,當物流倉庫的分揀臂每小時處理1200件包裹——這些場景都在訴說著機械臂作為"智能執行終端"的核心價值。作為集機械、電子、控制等多學科於一體的核心裝備,機械臂已從簡單的"替代人工"進化為"價值共創"的產業夥伴。今天,我們就全面拆解機械臂的技術內核與產業圖景。- 前言 - [一、本質認知:機械臂是什麼?
When a line robot welds its 1,000th seam, when a surgical robot assists at 0.1 mm precision, when a sorter moves 1,200 parcels/hour—these scenes highlight arms as intelligent actuators. Blending mechanics, electronics, and control, arms evolved from human replacement to value‑co‑creation partners. This post unpacks technology and market landscape end to end. Table of contents - Preface - 1. First principles: what is a robotic arm? - 2. Anatomy: the “body” of an arm - - 2.1 Mechanics: where motion lives - 2.2 Actuation: power sources - 2.3 Control: the “brain” - 3.

跳出情绪化的“封神/唱衰”,从蒸馏与对齐机制拆开 DeepSeek 的技术路线:在效率与长尾场景确有突破,但整体生态与安全栈相比海外旗舰仍有断层,顺带讨论蒸馏论文里长期存在的评判争议。
試圖從知識蒸餾與對齊流程理性看待 DeepSeek:哪些效率/場景創新確實成立、相較國外旗艦仍缺的能力,並點名蒸餾路線在研究與評測上的長期分歧。
A calm engineering read on DeepSeek through the distillation lens: where efficiency breakthroughs ring true, which ecosystem gaps persist versus frontier labs, plus recurring debates around student-model evaluation.

整理 Python 「SyntaxError: Non-UTF-8 …」与 UnicodeDecodeError: utf-8 codec can't decode 的定位顺序:源码声明、文件真实编码 VS 编辑器默认值、控制台代码页、python -X utf8,以及在必须兼容旧 GBK 数据时的变通策略。
彙總 Python 常見編碼錯誤的排查順序:檔頭宣告、磁碟檔案的實際編碼與 IDE 設定、終端機字碼頁、python -X utf8 與在遇到舊 GBK 資產時的折衷處置。
Operational checklist for Python encoding crashes: PEP 263 headers, aligning on-disk encoding with IDE defaults, aligning console code pages, optional python -X utf8, and pragmatic coexistence when legacy GBK assets remain.

三角洲、无畏契约等内置 ACE 反作弊会持续扫盘并让硬盘灯常亮。教程给出任务管理器中定位 Ace 组件、把优先级调至低并收窄 CPU 亲和性的步骤,并提醒长期监测与健康备份。
說明如何用 Windows 工作管理員降低 Tencent ACE 相關處理程序的優先權並調整 CPU 關聯性,緩解硬碟長時間全速讀寫造成的卡頓與老化疑慮,並補充健康監測建議。
When Tencent ACE services thrash your disk during games such as Delta Force or VALORANT, dampen churn by lowering Ace-related process priority and narrowing CPU affinity, then revisit SMART telemetry.

系列第八篇精读 DistilBERT:相较直接剪枝 teacher,为何要在预训练阶段做知识蒸馏并叠加三重损失,学生模型的结构删减策略,以及在 GLUE、IMDb、SQuAD 与端到端吞吐上换来了哪些折中答案。
第八篇精讀 DistilBERT:預訓練時期如何透過三重損失向 BERT Teacher 對齊,學生模型如何調整結構裁剪,並在 GLUE、IMDb、SQuAD 以及整體推論吞吐量上對比取捨。
Unpacks Hugging Face’s DistilBERT recipe—triple-loss distillation during pretraining, deliberate layer trims, deltas on GLUE/IMDb/SQuAD latency budgets, versus BERT-base.

智能车视觉组用 NXP eIQ 训练 MobileNet_v2 分类模型:数据导入、增强、训练验证、int8 导出部署到 OpenART,附竞赛训练技巧与逐飞资源链接。
智能車視覺組用 NXP eIQ 訓練 MobileNet_v2 分類模型:資料導入、增強、訓練驗證、int8 匯出部署到 OpenART,附競賽訓練技巧與逐飛資源連結。
Smart Car vision: eIQ + MobileNet_v2 pipeline—data, augmentation, training, int8 export to OpenART, with competition tips and Seekfree resources.

全量微调百亿、千亿参数语言模型会带来存储副本爆炸与算力不可及的问题;《LoRA: Low-Rank Adaptation of Large Language Models》(2021)提出在低秩假设下仅用极少量可训练参数(常见约原模型的万分之几到千分之几)插在 Transformer 的选定权重旁路,主干权重保持冻结即可适配下游任务。相较适配器等方法,它在显著压缩训练显存与可训练参数规模的同时,往往仍能匹配甚至更优的性能,且不引入额外推理时延。
全量微調超大型語言模型會造成儲存副本與運算資源需求失控;2021年的《LoRA: Low-Rank Adaptation of Large Language Models》在低秩假設下,只在 Transformer 指定線性層旁加入極少量可訓練的低秩矩陣、凍結預訓練主幹即可完成下游適配,可訓練參數常僅約原模型的萬分之幾到千分之幾,顯著降低記憆體與訓練成本;相較部分適配器類方法,往往能維持甚至超越全量微調表現且不增加線上推理延遲。
Full fine‑tuning of massive language models duplicates huge checkpoints per task—often hundreds of gigabytes each—while adapters add latency during inference. LoRA freezes pretrained weights and trains tiny low‑rank matrices alongside selected linear layers so only about 0.01%–0.2% of parameters ever update, cutting GPU memory and storage while usually matching full fine‑tuning quality with no observable inference slowdown versus the vanilla model.

近期腾讯游戏 ACE 反作弊系统的高强度扫盘引发广泛关注,不少玩家反馈游戏卡顿、硬盘异响,甚至于华硕官方都发视频教玩家如何限制腾讯ACE扫盘的优先级以保护硬件。如果你也担心ACE的长期扫盘损坏你的硬盘导致物理坏道或逻辑错误,可以通过这篇博客检查自己硬盘的健康状态。上一篇博客我们分享了通过调整任务优先级降低扫盘对硬盘的损耗;本文则聚焦于用免费的 DiskGenius 快速读取 SMART、执行坏道扫描,从而在早期发现潜在的硬件或介质问题。
近期騰訊遊戲 ACE 反作弊系統的高強度掃盤引發廣泛關注,不少玩家反饋遊戲卡頓、硬盤異響,甚至於華碩官方都發視頻教玩家如何限制騰訊ACE掃盤的優先級以保護硬件。若你擔心長時間掃盤可能催生壞道,本文演示如何以 DiskGenius 在不付費的情況下讀 SMART、做深度掃描,協助評估是否需要更換備份策略或硬體維護。
Tencent’s ACE anti‑cheat can hammer disks for long stretches; if you suspect wear after heavy scanning, DiskGenius is a reputable free utility for Windows that reads SMART summaries, launches quick or deep surface tests, and helps separate logical filesystem issues from budding physical defects—paired here with reminders about safe downloads and prepping backups first.

当人工智能从虚拟的数字世界迈向真实的物理空间,一场关乎“智能如何具象化”的革命正在悄然发生。2025年,“具身智能”首次被写入政府工作报告,成为国家重点培育的未来产业,全球领域融资超500亿元,中国产业规模更是达到4800亿元,同比增长67.8%。从工业车间的柔性生产到家庭场景的智能服务,从医疗辅助的精准操作到应急救援的危险作业,具身智能正以“物理实体+AI大脑”的形态,填补传统人工智能“只知不行”的能力鸿沟。人工智能的发展已历经感知智能(“看懂世界”)、认知智能(“理解语言”)两个阶段,如今正迈入具身智能的全新阶段——实现“在真实世界中行动”的关键跨越。
當人工智能從虛擬的數字世界邁向真實的物理空間,一場關乎“智能如何具象化”的革命正在悄然發生。2025年,“具身智能”首次被寫入政府工作報告,成為國家重點培育的未來產業,全球領域融資超500億元,中國產業規模更是達到4800億元,同比增長67.8%。從工業車間的柔性生產到家庭場景的智能服務,從醫療輔助的精準操作到應急救援的危險作業,具身智能正以“物理實體+AI大腦”的形態,填補傳統人工智能“只知不行”的能力鴻溝。人工智能的發展已歷經感知智能(“看懂世界”)、認知智能(“理解語言”)兩個階段,如今正邁入具身智能的全新階段——實現“在真實世界中行動”的關鍵跨越。
As AI steps from bits into atoms, a revolution asks how intelligence becomes physical. In 2025, “embodied intelligence” entered China’s Government Work Report as a future industry priority; global financing topped ¥50B+, China’s industry ¥480B+, +67.8% YoY. From flexible factories to home assistance, precise medical work to hazardous rescue, embodied systems—“physical bodies + AI minds”—bridge the classic gap where models “know but cannot do.” After perception (“see”) and cognition (“understand language”), we enter embodied AI—the leap to act in the real world.

解读 OpenAI 2022 年《Training Language Models to Follow Instructions with Human Feedback》(InstructGPT):用 RLHF(监督微调、奖励建模、强化学习对齐)把大模型从「会说话」拉到更听指令、更少胡编有害输出。
解讀 OpenAI 2022 年《Training Language Models to Follow Instructions with Human Feedback》(InstructGPT):以 RLHF(監督微調、獎勵模型、強化對齊)讓大模型更服從指令、減少捏造與有害輸出。
A concise walkthrough of OpenAI’s 2022 InstructGPT paper: RLHF — SFT plus a preference-trained reward model and PPO refinement — aligns large language models to follow instructions and curb toxic or fabricated answers.

本文为智能车视觉组系列:以 TensorFlow 2.x 上的 YOLO3 Nano 为主线,说明 VOC 标注(LabelImg/官方标注包)、config 与 TFRecord 转换、k-means 锚框、训练与评估,以及将带后处理的 TFLite 部署到 OpenART(QVGA 实时检测示例代码)与 PC 验证思路。
本篇屬智能車視覺組系列:介紹 TensorFlow 2.x 版 YOLO3 Nano 的 VOC 標註(LabelImg/官方標註包)、設定檔與 TFRecord 轉換、k-means 錨框、訓練與評估,以及將含後處理的 TFLite 部署至 OpenART(附註解採集迴圈)與在電腦端驗證的做法。
This installment of the smart-car vision series covers YOLO3 Nano on TensorFlow 2.x: VOC labeling, config.cfg paths, TFRecord conversion, k-means anchors, training/eval, deploying the post-processed TFLite to OpenART with a commented capture loop, and optional PC-side checks.

文章复盘 3DDFA V2 复现要点:Windows 下修改 np.long、cpu_nms.pyx、build.py 与 MSVC 环境、编译 FaceBoxes/Sim3DR,并改写 demo 为 ONNX/GPU、pose 模式输出欧拉角。
整理在 Windows 上復現 3DDFA V2:np.long 與 cpu_nms、build.py、build_ext,以及 ONNX/GPU、pose 模式輸出欧拉角的程式改寫重點。
Reproduction notes for cleardusk/3DDFA V2 on Windows (NumPy and Cython edits, MSVC vs gcc flags), native extension builds, and a ONNX/GPU pose wrapper that prints Euler angles per face.

梳理 AIGC、AI4S、计算机视觉、NLP 四大 AI 领域的定义、代表技术与落地场景,说明彼此协同关系,并以 HealthGPT 医疗大模型为例展示跨领域融合。
梳理 AIGC、AI4S、電腦視覺、NLP 四大 AI 領域的定義、代表技術與落地場景,說明彼此協同關係,並以 HealthGPT 醫療大模型為例展示跨領域融合。
Overview of AIGC, AI4S, computer vision, and NLP—definitions, flagship tech, use cases, how they fit together, plus HealthGPT as a cross-domain medical example.

解读 Switch Transformer:k=1 路由、负载均衡损失与三重并行实现万亿参数稳定训练,并对比预训练/下游结果及工业界密集模型+RAG 的权衡。
解讀 Switch Transformer:k=1 路由、負載均衡損失與三重並行實現萬億參數穩定訓練,並對比預訓練/下游結果及工業界密集模型+RAG 的權衡。
Switch Transformers: k=1 routing, load-balancing loss, triple parallelism for stable trillion-param training, benchmark wins, and why industry often picks dense models plus RAG.

在人工智能技术从理论突破走向工程落地的进程中,一篇篇里程碑式的论文如同灯塔,照亮了技术演进的关键路径。为帮助大家吃透 AI 核心技术的底层逻辑、理清行业发展脉络,博主推出「AI 十大核心论文解读系列」,每篇聚焦一篇关键论文的问题背景、核心创新与行业影响。本篇博客解读AI领域十大论文的第二篇——《Language Models are Few-Shot Learners》论文。
在人工智能技術從理論突破走向工程落地的進程中,一篇篇里程碑式的論文如同燈塔,照亮了技術演進的關鍵路徑。為幫助大家吃透 AI 核心技術的底層邏輯、理清行業發展脈絡,博主推出「AI 十大核心論文解讀系列」,每篇聚焦一篇關鍵論文的問題背景、核心創新與行業影響。本篇博客解讀AI領域十大論文的第二篇——《Language Models are Few-Shot Learners》論文。
This instalment analyzes OpenAI’s “Language Models are Few‑Shot Learners” (GPT‑3): it scales autoregressive Transformers to 175B parameters and shows that gigantic models can solve many NLP tasks purely via in‑context prompting—zero‑shot, one‑shot, or few‑shot—without gradient updates. The article walks through benchmarks, prompting tricks, scaling laws, strengths and limits of “eliciting skills from examples,” plus how GPT‑3 reshaped subsequent LLM engineering.

手把手教你在 Windows(任务管理器禁用启动项)和 macOS(系统设置→登录项)中关闭无用开机自启程序,附注意事项:勿禁用驱动/输入法/系统服务,分批测试,从而缩短开机时间、减少弹窗与内存占用。
手把手教你在 Windows(任務管理器禁用啟動項)和 macOS(系統設置→登錄項)中關閉無用開機自啟程序,附注意事項:勿禁用驅動/輸入法/系統服務,分批測試,從而縮短開機時間、減少彈窗與內存佔用。
Boot takes forever? WeChat and video apps pop up the second you log in? Extra startup items stretch boot time and eat RAM before you do real work. This guide for Windows (Win10/Win11) and macOS uses step-by-step + screenshots—no code, no pro tools. Follow along; about one minute for a noticeable speed-up.

2、Transformer整体架构:编码器+解码器的“精密协作系统” 论文节详细描述了架构细节,核心是“6层堆叠+残差连接+层归一化”,每个组件都有明确的设计目标,下面结合参数和原理双向解读:
2、Transformer整體架構:編碼器+解碼器的“精密協作系統” 論文節詳細描述了架構細節,核心是“6層堆疊+殘差連接+層歸一化”,每個組件都有明確的設計目標,下面結合參數和原理雙向解讀:
2. Transformer overall architecture: The "Precision Collaboration System" paper section of the encoder + decoder details the architecture. The core is "6-layer stacking + residual connection + layer normalization". Each component has a clear design goal. The following is a two-way interpretation combined with parameters and principles:

文章介绍智能车视觉中基于 OpenMV 的色块检测:说明 HSV/LAB 阈值思路、用阈值选择器取样调参的步骤,以及 find_blobs 示例代码与调试要点。
文章介紹智能車視覺中以 OpenMV 做色塊偵測:說明 HSV/LAB 閾值觀念、門檻編輯器取樣調參流程,以及 find_blobs 範例程式與除錯要點。
The article covers blob detection with OpenMV for smart‑car vision: rationale for LAB/HSV thresholds, Threshold Editor workflow, and a runnable find_blobs example with tuning tips.

分析 moviepy 导入 moviepy.editor 失败的原因:2.0+ 版本移除 editor 子模块应改为 from moviepy import ...,或未安装/安装失败需 pip install;也可降级到 1.0.3 保留旧导入方式。
分析 moviepy 導入 moviepy.editor 失敗的原因:2.0+ 版本移除 editor 子模塊應改為 from moviepy import ...,或未安裝/安裝失敗需 pip install;也可降級到 1.0.3 保留舊導入方式。
Insert image description here Python cannot find the moviepy.editor module. Usually one of: 1.1 Version change (most common) In 1.x, APIs lived under moviepy.editor, so from moviepy.editor import ... was correct. In 2.0+, editor was removed and symbols moved to the top-level moviepy package. Old imports then fail. 1.2 moviepy not installed correctly Missing install or a broken install (network, permissions) also triggers import errors.

基于强化学习之父 Sutton 的观点,对比大语言模型“模仿文本”与强化学习“与世界交互”的路线差异,讨论智能本质、莫拉维克悖论、Alpha Zero 启示及人类应传递价值观而非单纯控制 AI。
基於強化學習之父 Sutton 的觀點,對比大語言模型「模仿文本」與強化學習「與世界互動」的路線差異,討論智能本質、莫拉维克悖論、Alpha Zero 啟示及人類應傳遞價值觀而非單純控制 AI。
Sutton’s critique of LLMs vs RL—imitation vs world interaction, goals vs next-token prediction, Moravec’s paradox, Alpha Zero, and guiding AI with human values.

精讲复旦 NLP 综述《The Rise and Potential of Large Language Model Based Agents》:大脑-感知-行动框架、单/多/人机与社群场景、工具 SKMA 与安全评估四维体系及开放问题。
精講復旦 NLP 綜述《The Rise and Potential of Large Language Model Based Agents》:大腦-感知-行動框架、單/多/人機與社群場景、工具 SKMA 與安全評估四維體系及開放問題。
Deep dive on Fudan NLP’s survey on LLM agents: Brain–Perception–Action framework, single/multi/human/society scenarios, tool SKMA and safety, four-dimensional evaluation, and open research questions.

本人在使用IEEE官方LaTeX模版(IEEEtran.cls)撰写论文时,遇到一个共性问题:明明在\author中用\thanks加了作者隶属关系(单位)和通讯邮箱,编译后却完全不显示;或是作者名右上角标记异常(比如想显示“1”却出现“*”)。这并非代码bug,而是IEEE模版的专属排版规则——它和普通LaTeX文档的作者信息配置逻辑完全不同。
本人在使用IEEE官方LaTeX模版(IEEEtran.cls)撰寫論文時,遇到一個共性問題:明明在\author中用\thanks加了作者隸屬關係(單位)和通訊郵箱,編譯後卻完全不顯示;或是作者名右上角標記異常(比如想顯示“1”卻出現“*”)。這並非代碼bug,而是IEEE模版的專屬排版規則——它和普通LaTeX文檔的作者信息配置邏輯完全不同。
On the official IEEEtran.cls template, I put affiliation and email inside \thanks under \author, but they never appeared—or markers showed * instead of 1. This is not a random bug; IEEE author blocks follow their own rules, not generic article \thanks usage.

针对二维云台跟踪目标时抖动大、PID 难调的痛点,本篇分析阻塞型步进控制在视觉帧间歇“停‑启”所带来的冲击,并提出在 MSPM0 上以非阻塞方式按最新视觉误差实时刷新步进脉冲频率,从而在保持闭环响应速度的同时压低机械抖动。
針對二維雲台追蹤目標時抖動大、PID 難調的痛點,本篇分析阻塞型步進控制在視覺幀間歇「停‑啟」所帶來的衝擊,並提出在 MSPM0 上以非阻塞方式按最新視覺誤差即時刷新步進脈衝頻率,從而在保持閉環回應速度的同時壓低機械抖動。
The post diagnoses why blocking step‑per moves make a two‑axis gimbal hunt and jitter whenever vision packets arrive sporadically, then presents an MSPM0 firmware pattern that recomputes step timing on every UART update instead of forcing each move to completion—keeping motors energized between frames so tracking loops stay smooth and PID gains easier to stabilize.

基于 Whisper + moviepy + tkinter 的开源音视频转 SRT 字幕工具:GUI 选文件、提取音频、中文识别、繁转简、双进度条与 ETA,附完整可运行代码与依赖安装说明。
基於 Whisper + moviepy + tkinter 的開源音視頻轉 SRT 字幕工具:GUI 選檔、提取音頻、中文識別、繁轉簡、雙進度條與 ETA,附完整可運行程式與依賴安裝說明。
Open-source GUI tool: extract audio with moviepy, transcribe with Whisper (Chinese), emit SRT with OpenCC simplification—dual progress bars, ETA, full code and install guide.

在人工智能技术从理论突破走向工程落地的进程中,一篇篇里程碑式的论文如同灯塔,照亮了技术演进的关键路径。为帮助大家吃透 AI 核心技术的底层逻辑、理清行业发展脉络,博主推出「AI 十大核心论文解读系列」,每篇聚焦一篇关键论文的问题背景、核心创新与行业影响。本篇博客解读AI领域十大论文的第五篇——《Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks》(检索增强生成:面向知识密集型NLP任务的解决方案)。
在人工智能技術從理論突破走向工程落地的進程中,一篇篇里程碑式的論文如同燈塔,照亮了技術演進的關鍵路徑。為幫助大家吃透 AI 核心技術的底層邏輯、理清行業發展脈絡,博主推出「AI 十大核心論文解讀系列」,每篇聚焦一篇關鍵論文的問題背景、核心創新與行業影響。本篇博客解讀AI領域十大論文的第五篇——《Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks》(檢索增強生成:面向知識密集型NLP任務的解決方案)。
DPR;Waiter picks Top-K dishes (docs);BART;Chef cooks answer from order + dishes;FAISS index;Menu library—swap without retraining staff

第二十届全国大学生智能汽车竞赛智能视觉组有着较复杂的机器视觉处理与运动控制任务。此前,我们已围绕色块检测、YOLO3 Nano目标检测、eIQ训练分类模型等基础技术展开了初步探讨,这些技术为视觉模块的搭建提供了核心支撑。但结合本届比赛的具体规则——需完成红色立方体定位、15类工程师周边物品分类及0-99手写数字奇偶性判断,且需适配NXP微控制器与指定图像处理模块,单一技术方案难以满足所有场景需求。本文将基于比赛实际约束,深入分析视觉模块的多种实现思路,为参赛队伍提供更具针对性的技术参考。
機器視覺:智能車大賽視覺組技術文檔——OpenArt結合OpenMV實現色塊檢測 機器視覺:智能車大賽視覺組技術文檔——用 YOLO3 Nano 實現目標檢測並部署到 OpenART 機器視覺:智能車大賽視覺組技術文檔——用eIQ工具高效訓練分類模型 機器視覺:智能車大賽視覺組技術文檔——第20屆智能車比賽視覺組視覺模塊多種思路分析
OpenArt + OpenMV color blob detection YOLOv3 Nano detection on OpenART eIQ classification training This post: multi-approach analysis

结合 AI AS 2025 峰会与三项诺奖级案例,解读 AI for Science 如何从材料、蛋白质设计到 CRISPR 数据闭环,把 AI 从科研辅助工具升级为科学发现的“第五范式”。
結合 AI AS 2025 峰會與三項諾獎級案例,解讀 AI for Science 如何從材料、蛋白質設計到 CRISPR 資料閉環,把 AI 從科研輔助工具升級為科學發現的「第五範式」。
Uses AI AS 2025 and three Nobel-level cases to explain AI for Science—from MOF water harvesting and de novo proteins to CRISPR-generated training data—and how AI becomes a fifth paradigm of discovery rather than a mere lab assistant.

从 Windows 用户视角介绍 Linux 服务器常用命令:目录与文件操作、权限、查找与日志、进程与端口、压缩解压及 apt 包管理,并给出 Tab 补全、重定向等实用技巧与安全提醒。
從 Windows 用戶視角介紹 Linux 伺服器常用命令:目錄與檔案操作、權限、查找與日誌、進程與埠、壓縮解壓及 apt 套件管理,並給出 Tab 補全、重定向等實用技巧與安全提醒。
A Windows-to-Linux server CLI primer: file and permission basics, find/grep, process and port tools, tar/unzip, apt usage, handy shortcuts, and safety notes including avoiding destructive rm.

人脸识别项目中onnxruntime DLL加载失败的多种解决方案:降级GPU版1.14.1、重装、清理GPU/CPU冲突、安装VC++ 2019运行库,以及Anaconda新建Python 3.9环境。
人臉識別專案中onnxruntime DLL載入失敗的多種解決方案:降級GPU版1.14.1、重裝、清理GPU/CPU衝突、安裝VC++ 2019執行庫,以及Anaconda新建Python 3.9環境。
Fix onnxruntime DLL load failures: downgrade to GPU 1.14.1, reinstall, resolve GPU/CPU conflicts, install VC++ 2019, or use a clean Python 3.9 conda env.
根据以下步骤进行示例文件的Import 图中的driverlib即是我们需要使用到的例程文件,可以看到这里面有许多gpio相关的例程文件,点进去之后里面是有四个文件夹,我们不需要点开任何一个,直接选择文件夹就好,这里我们用到的是gpio_software_poll软件轮询 导入之后即是README文件的界面,可以先阅读一下,重点是Example Summary部分与Example Usage部分。 ---
根據以下步驟進行示例文件的Import 圖中的driverlib即是我們需要使用到的例程文件,可以看到這裡面有許多gpio相關的例程文件,點進去之後裡面是有四個文件夾,我們不需要點開任何一個,直接選擇文件夾就好,這裡我們用到的是gpio_software_poll軟件輪詢 導入之後即是README文件的界面,可以先閱讀一下,重點是Example Summary部分與Example Usage部分。 ---
Follow the wizard: Pick driverlib examples—use gpio_software_poll (select the folder, don’t drill in). Read README Example Summary and Example Usage. ---

介绍 Streamlit 中通过 st.markdown、st.html 与外部 CSS 自定义标题、按钮、表格样式,并完成品牌化销售数据展示示例。
介紹 Streamlit 中透過 st.markdown、st.html 與外部 CSS 自訂標題、按鈕、表格樣式,並完成品牌化銷售資料展示範例。
Customize Streamlit UI with st.markdown, st.html, and external CSS for titles, buttons, tables, plus a styled sales dashboard demo.

OpenMV 红色小球 UART 传偏差,MSPM0 PID 驱动 D36A 双路步进二维云台追踪,含阈值编辑与阻塞控制说明。
OpenMV 紅色小球 UART 傳偏差,MSPM0 PID 驅動 D36A 雙路步進二維雲台追蹤,含閾值編輯與阻塞控制說明。
OpenMV sends ball offset over UART; MSPM0 PID drives a D36A dual-stepper gimbal for tracking, with threshold tuning notes.

简要说明 MSPM0G3507 LaunchPad 外部供电:应在 USB 5V 稳压链路末端接入 5V 与地替代 USB 供电,不推荐直接接 3.3V 以免 EnergyTrace 导致 RESET 被拉低、需拔跳线且复位键失效。
簡要說明 MSPM0G3507 LaunchPad 外部供電:應在 USB 5V 穩壓鏈路末端接入 5V 與地替代 USB 供電,不推薦直接接 3.3V 以免 EnergyTrace 導致 RESET 被拉低、需拔跳線且復位鍵失效。
This chapter only briefly shows how to power the LaunchPad externally—no deep theory.

在机器学习的世界里,“训练出模型”只是第一步,更重要的是判断模型好不好用。就像学生考试后需要“成绩单”评估学习效果,机器学习模型也需要“评估指标”来衡量其性能——它不仅能告诉我们模型的泛化能力强弱,还能指导我们调优方向(比如该减少漏诊还是误诊)。
在機器學習的世界裡,“訓練出模型”只是第一步,更重要的是判斷模型好不好用。就像學生考試後需要“成績單”評估學習效果,機器學習模型也需要“評估指標”來衡量其性能——它不僅能告訴我們模型的泛化能力強弱,還能指導我們調優方向(比如該減少漏診還是誤診)。
Confusion Matrix;Detailed ledger of correct/wrong predictions (TP/TN/FP/FN); basis for many metrics;Accuracy;Fraction of all samples predicted correctly;Top1/Top5/Top10 Accuracy;In multi-class tasks, whether true class is in top-K predicted classes

从零安装NVIDIA驱动、CUDA、cudnn到PyTorch/torchvision的保姆级教程,强调版本匹配链(驱动→CUDA→cudnn→Torch),含环境变量与南大镜像源选包方法。
從零安裝NVIDIA驅動、CUDA、cudnn到PyTorch/torchvision的保姆級教程,強調版本匹配鏈(驅動→CUDA→cudnn→Torch),含環境變數與南大鏡像源選包方法。
Step-by-step NVIDIA driver, CUDA, cuDNN, PyTorch, and torchvision install with strict version alignment and mirror-based wheel selection.

解释 pip install PIL 失败的原因:PIL 已停更,Python 3 应安装 Pillow(pip install pillow)但代码中仍用 from PIL import Image 导入;附安装、示例代码与避坑提醒。
解釋 pip install PIL 失敗的原因:PIL 已停更,Python 3 應安裝 Pillow(pip install pillow)但代碼中仍用 from PIL import Image 導入;附安裝、示例代碼與避坑提醒。
Beginners following “use PIL for images” try pip install PIL after from PIL import Image and get Could not find a version that satisfies the requirement PIL.

2025 电赛 MSPM0 系列开篇:CCS 安装勾选 MSPM0 支持、TI SDK 下载安装注意军事实体选项填 NO、CCS 工程导入与头文件路径配置、清除残留报错,附原理图下载链接。
2025 電賽 MSPM0 系列開篇:CCS 安裝勾選 MSPM0 支持、TI SDK 下載安裝注意軍事實體選項填 NO、CCS 工程導入與頭文件路徑配置、清除殘留報錯,附原理圖下載鏈接。
CCS install is mostly next-next; many CSDN guides exist—see e.0 install guide](https: //blog.net/weixin_43042683/article/details/143433275).On the device-selection screen, check at least MSPM0 support for this board: The SDK is a bundle of peripheral examples—not a separate IDE.

为备战 2025 电赛云台类题目,作者用 MSPM0G3507 搭配 D36A 双通道驱动两颗 42 步进电机,自研三维打印桁架组装二维云台,并分享了当前只做轨迹跟随、尚未挂载激光绘图头时的软硬件连线、引脚映射与画图控制思路。
為備戰 2025 電賽雲臺類題目,作者以 MSPM0G3507 搭配 D36A 雙通道驅動兩顆 42 步進電機,自製 3D 列印桁架組裝二維雲台,並說明目前僅完成軌跡跟隨、尚未安裝雷射頭時的連線、腳位與繪圖控制思路。
The build pairs an MSPM0G3507 MCU with one D36A dual stepper driver powering two NEMA‑17 motors on a printable two‑axis cradle meant for electronics‑contest gimbals; wiring, pinmux, mechanics, and the current firmware that traces paths—even before attaching a laser head—are explained so readers can replicate the rig quickly.

介绍随机森林原理(Bootstrap、特征子空间、集成投票),并以加州房价数据集演示 sklearn 训练、MSE/MAE/R² 评估、特征重要性与 joblib 模型保存调用。
介紹隨機森林原理(Bootstrap、特徵子空間、集成投票),並以加州房價資料集演示 sklearn 訓練、MSE/MAE/R² 評估、特徵重要性與 joblib 模型保存調用。
Random Forest theory plus sklearn walkthrough on California housing—train, MSE/MAE/R², feature importance, and joblib save/load.

如果你是 Python 开发者,想快速将数据分析脚本、机器学习模型转成可交互的 Web 应用,却又不想陷入 HTML/CSS/JS 的复杂开发中,那么 Streamlit 绝对是你的理想工具。今天这篇文章,我们将带你从零开始掌握 Streamlit 的核心基础,不涉及任何 CSS 渲染内容,专注于用最简单的方式搭建可用的 Web 应用。
如果你是 Python 開發者,想快速將數據分析腳本、機器學習模型轉成可交互的 Web 應用,卻又不想陷入 HTML/CSS/JS 的複雜開發中,那麼 Streamlit 絕對是你的理想工具。今天這篇文章,我們將帶你從零開始掌握 Streamlit 的核心基礎,不涉及任何 CSS 渲染內容,專注於用最簡單的方式搭建可用的 Web 應用。
If you are a Python developer who wants to turn analysis scripts or ML models into interactive web apps without drowning in HTML/CSS/JS, Streamlit is a great fit. This post walks you through Streamlit fundamentals from zero—no CSS theming yet—just the simplest path to a working web app.

本文是MSPM0开发学习笔记第六章,介绍DAC(数模转换器)的原理与SysConfig配置方法,包括参考电压、8位/12位分辨率等关键参数设置。附带完整示例代码,演示如何通过公式计算DAC输出值并设置指定电压。
本文是MSPM0開發學習筆記第六章,介紹DAC(數模轉換器)的原理與SysConfig配置方法,包括參考電壓、8位元/12位元解析度等關鍵參數設定。附帶完整範例程式碼,示範如何透過公式計算DAC輸出值並設定指定電壓。
This is Chapter 6 of the MSPM0 development study notes, covering DAC (Digital-to-Analog Converter) principles and SysConfig configuration, including reference voltage and 8-bit/12-bit resolution settings. Includes complete sample code demonstrating how to calculate DAC output values and set a specified voltage.

2025 电赛二维云台:MSPM0G3507 + D36A 驱动双 42 步进电机,含接线表、Keil/逐飞库 C 代码(角度转脉冲、单轴/双轴转动)及细分与减速比修正说明。
2025 電賽二維雲台:MSPM0G3507 + D36A 驅動雙 42 步進電機,含接線表、Keil/逐飛庫 C 程式(角度轉脈衝、單軸/雙軸轉動)及細分與減速比修正說明。
2025 competition 2-axis gimbal: MSPM0G3507 + D36A driving two NEMA-42 motors—wiring, Keil/Seekfree C code, microstepping and gear-ratio calibration.
树莓派 5 + D36A 驱动控制 42 步进电机:GPIO 接线表与 gpiozero 的 StepperMotor_42 类(PWM 脉冲、方向、使能),含转速与 PWM 频率换算公式。
樹莓派 5 + D36A 驅動控制 42 步進電機:GPIO 接線表與 gpiozero 的 StepperMotor_42 類(PWM 脈衝、方向、使能),含轉速與 PWM 頻率換算公式。
Pi 5 + D36A driver for 42-stepper: wiring table and gpiozero StepperMotor_42 (PWM pulse, DIR, EN) with RPM vs. PWM frequency formula.

用 PyQt5 + DeepSeek API 实现桌面 AI 对话助手:QThread 流式输出、密钥配置界面与完整可运行源码讲解。
用 PyQt5 + DeepSeek API 實現桌面 AI 對話助手:QThread 流式輸出、密鑰配置界面與完整可運行源碼講解。
Desktop AI chat with PyQt5 and DeepSeek API: threaded streaming UI, API key setup, and full runnable source walkthrough.
ADC(模数转换器)将传感器上的模拟电压等量测转换成 MCU 可用的数字码字,本篇在 MSPM0 入门语境下简述其基本概念、应用场景,并配合 SysConfig 与示例工程演示一次最简数据采集流程。
ADC(模數轉換器)將感測器上的類比電壓等量測轉成 MCU 可用的數位碼字,本篇在 MSPM0 入門語境下簡述其基本概念、應用場景,並搭配 SysConfig 與示例工程演示一次最簡資料擷取流程。
This primer explains how MSPM0’s analog‑to‑digital converter turns real‑world analog voltages into digital samples the CPU can process, sketches typical use‑cases such as metering temperature or joystick inputs on a microcontroller, then walks through a minimal SysConfig plus driverlib example for taking the first readings.
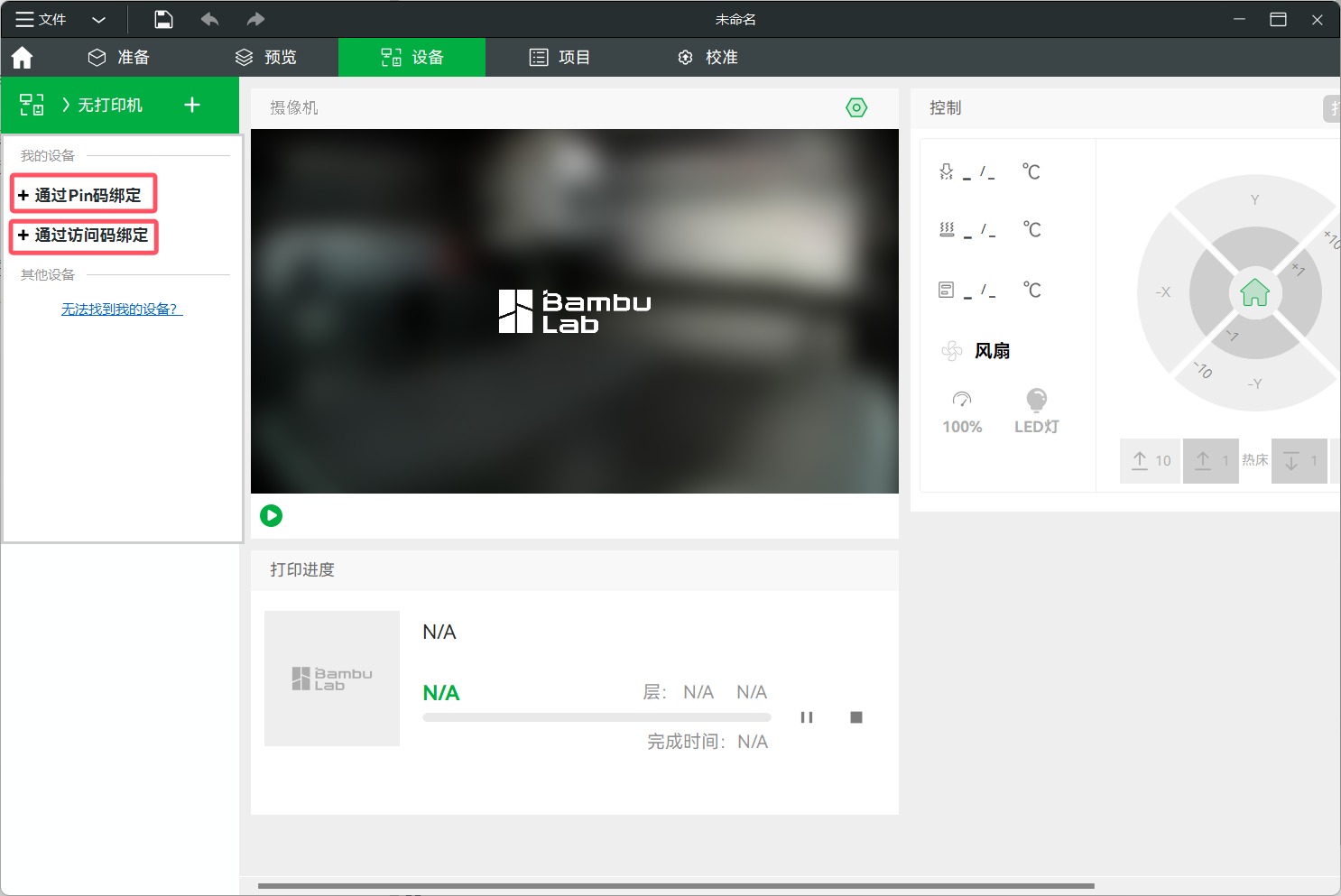
Bambu Studio 入门:下载安装、局域网内通过访问码连接打印机、导入 3MF 模型并设置喷嘴/支撑/层高等参数、切片打印,以及进料退料注意事项,帮助新手完成首次 3D 打印。
Bambu Studio 入門:下載安裝、局域網內通過訪問碼連接打印機、導入 3MF 模型並設置噴嘴/支撐/層高等參數、切片打印,以及進料退料注意事項,幫助新手完成首次 3D 打印。
Bambu Studio is control software for Bambu Lab printers—clear UI and rich options for jobs. This series helps beginners learn core features and basic workflow.

从代理原理、快代理隧道配置到 requests proxies 集成与有效性校验,结合央视节目高频爬取说明如何用动态代理规避 IP 封禁。
從代理原理、快代理隧道配置到 requests proxies 整合與有效性校驗,結合央視節目高頻爬取說明如何用動態代理規避 IP 封禁。
Proxy fundamentals, Kuaidaili tunnel setup, requests integration, validity checks, and a CCTV program crawler case for beating IP bans at scale.

爬取 datashareclub 24 小时历史天气:requests 抓取、正则解析 JS 变量、合并 CSV 保存,附完整可运行代码。
爬取 datashareclub 24 小時歷史天氣:requests 抓取、正則解析 JS 變數、合併 CSV 保存,附完整可執行程式碼。
Scrape datashareclub hourly weather via requests, regex on JS vars, and merged CSV export with full runnable code.

如果你经常用 Python,肯定遇到过这样的场景:想安装一个第三方库,比如requests或pandas,在命令行敲下pip install requests后,进度条半天不动,要么卡在 “Collecting requests”,要么弹出 “ReadTimeoutError”—— 这不是你的网络差,而是 pip 默认的软件源在国外服务器(https: //pypi.org/simple/),考虑到限制,速度自然慢得让人着急。 其实解决办法很简单:把 pip 的下载源换成国内镜像源(国内服务器复制了国外源的所有内容,就近访问速度拉满) 今天这篇文章,从基础概念到实操步骤,手把手教你搞定 pip 镜像源配置。
如果你經常用 Python,肯定遇到過這樣的場景:想安裝一個第三方庫,比如requests或pandas,在命令行敲下pip install requests後,進度條半天不動,要麼卡在 “Collecting requests”,要麼彈出 “ReadTimeoutError”—— 這不是你的網絡差,而是 pip 默認的軟件源在國外服務器(https: //pypi.org/simple/),考慮到限制,速度自然慢得讓人著急。 其實解決辦法很簡單:把 pip 的下載源換成國內鏡像源(國內服務器複製了國外源的所有內容,就近訪問速度拉滿) 今天這篇文章,從基礎概念到實操步驟,手把手教你搞定 pip 鏡像源配置。
Tsinghua University;https: //pypi.cn/simple/;Alibaba Cloud;https://mirrors.com/pypi/simple/;Douban;https://pypi.com/simple/

讲解 MSPM0 定时器 PWM 原理与 SysConfig 配置,附基础启动代码及按键切换双通道占空比的进阶示例。
講解 MSPM0 定時器 PWM 原理與 SysConfig 配置,附基礎啟動程式碼及按鍵切換雙通道占空比的進階範例。
Covers MSPM0 timer PWM theory, SysConfig setup, starter code, and a button-driven example that swaps duty cycles on two channels.

MTCNN 检测 + Caffe 性别/年龄模型批量统计人脸属性,输出性别与年龄段分布、平均年龄及多脸图片路径报告。
MTCNN 檢測 + Caffe 性別/年齡模型批次統計人臉屬性,輸出性別與年齡段分布、平均年齡及多臉圖片路徑報告。
Batch face gender/age stats with MTCNN detection and Caffe classifiers, exporting distributions, mean age, and multi-face file lists.
博文介绍在局域网内让树莓派作为 TCP 服务端、主机作为客户端的 Python socket 示例:含联网与查 IP 的前置说明,以及 bind/listen/accept 与 connect 收发循环与完整示例代码。
示範在區網中以樹莓派當 TCP 伺服器、主機當用戶端:附上連線準備與查 IP、bind/listen/accept 與用戶端收發的中文輸出入範例程式。
Covers LAN TCP between a Raspberry Pi server (bind/listen/accept) and a desktop client (connect), with preparation links plus minimal Python echo/send code blocks matching the Chinese source strings.

MSPM0 定时器入门:讲解时钟分频、计数模式与中断机制,演示 SysConfig 配置 TIMER 及用 Zero 事件中断翻转 LED 的示例代码。
MSPM0 定時器入門:講解時鐘分頻、計數模式與中斷機制,示範 SysConfig 設定 TIMER 及以 Zero 事件中斷翻轉 LED 的範例程式。
MSPM0 timer primer: clock/prescaler, counter modes, IRQs, SysConfig TIMER setup, and sample code that toggles LEDs on zero-event interrupts.

Python人脸聚类工具:MTCNN检测、InsightFace特征、余弦相似度聚类,支持多进程批处理、相似分组保存与重复照片删除,适用于说话人/人脸数据集整理。
Python人臉聚類工具:MTCNN檢測、InsightFace特徵、餘弦相似度聚類,支援多進程批處理、相似分組保存與重複照片刪除,適用於說話人/人臉資料集整理。
Python face clustering with MTCNN, InsightFace embeddings, cosine similarity grouping, multiprocessing, and duplicate photo cleanup.

解决 moviepy 升级后 No module named 'moviepy.editor':新版(如 2.2.1)已移除 editor 模块,卸载后安装支持 from moviepy.editor import * 的 1.0.3 版本即可恢复正常。
解決 moviepy 升級後 No module named 'moviepy.editor':新版(如 2.2.1)已移除 editor 模塊,卸載後安裝支持 from moviepy.editor import * 的 1.0.3 版本即可恢復正常。
The program worked before.After a moviepy-related issue, upgrading moviepy triggered this import error.Likely a version mismatch.Check moviepy 2.